 |
dynamic-graph
4.4.3
Dynamic graph library
|


|
|
dynamic-graph
4.4.3
Dynamic graph library
|
|
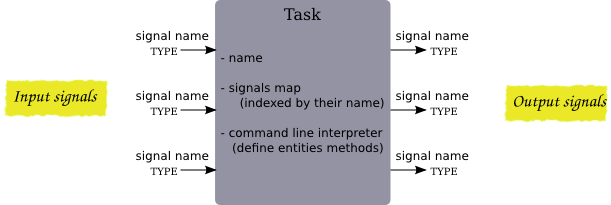
Despite the fact that it looks very similar to a ROS node or a CORBA/OpenRTM server, an entity is simply a C++ object. The main idea is that this entity is providing mostly a data-driven functionnality working at very high rate ( \( 200 Hz\) or \( 1 kHz \)) and should have a minimal computational time foot-print.
For this Signals (or ports to use a more classical terminology) are providing a time dependency between data. To implement this, an output signal is linked with a method of the entity. The method calls input signals or use other means to get the needed data. It might be provided by the connection with remote computers through a middleware, or specific protocols, but in general the external data is based upon the sensor values provided by a "Device" entity. For this reason the signal evaluations are realized through the cascade of dependencies and start from the evaluation of an input signal of a periodic node (in general the device). This is realized inside a real-time thread.
To add flexibility to a node, it is possible to add command with arguments to modify the internal behavior of the entity or get information from the entity. As a command is in general asynchronous and rare with respect to the data-flow scheme for the signals the command is in general executed in a none-real-time thread. For more details on command see Commands .
Entities are implemented as C++ classes and compiled as dynamic libraries. They can be loaded and instancied dynamically. It is therefore necessary to specify the location of their dynamical libraries. However given the time it might take to load the library, it is not advised to do that during a control-law computation. Entity instanciation also implies memory allocation which is also time consuming and thus not advised inside a real-time thread.
The entities will be placed in ${PREFIX}/lib/dynamic-graph-plugin (since this may change, it is advised to check the install log or the CMakeLists.txt file to check the installation path).
Since most of the functionality in projects using the dynamic-graph framework is exposed from entities, here is a short description of all the entities contained in this package. Note that most entities are contained in a binary file that closely matches the entities' names in the scripts; loading this file with the plugin loader will enable creation of this entity through the factory.
It is possible to derive classes and apply specific semantic for the entities. In our case we are interested in specific control semantics:
 1.8.17
1.8.17