|
sot-torque-control
1.6.5
Collection of dynamic-graph entities aimed at implementing torque control on different robots.
|


|
|
sot-torque-control
1.6.5
Collection of dynamic-graph entities aimed at implementing torque control on different robots.
|
|
In the following, we quickly demonstrate how to run a test with sot-torque-control and talos-torque-control.
First of all, you need to start the simulation.
To start Gazebo, load a scene and spawn Talos, the simplest way is to directly use the launch file provided by PAL:
Notice that this will spawn Talos at configuration zero. This is not always what you want. The package talos_data offers different launch files to spawn it at different configurations.
Most commonly, you might want to spawn the robot in the half-sitting position:
To start the SoT in simulation in position mode:
To start the SoT in simulation in torque mode:
First of all, you need to go to the folder where your script is. For instance, for running the standard tests of talos-torque-control, assuming you are in the root directory:
Then, you can just run the chosen test. For instance:
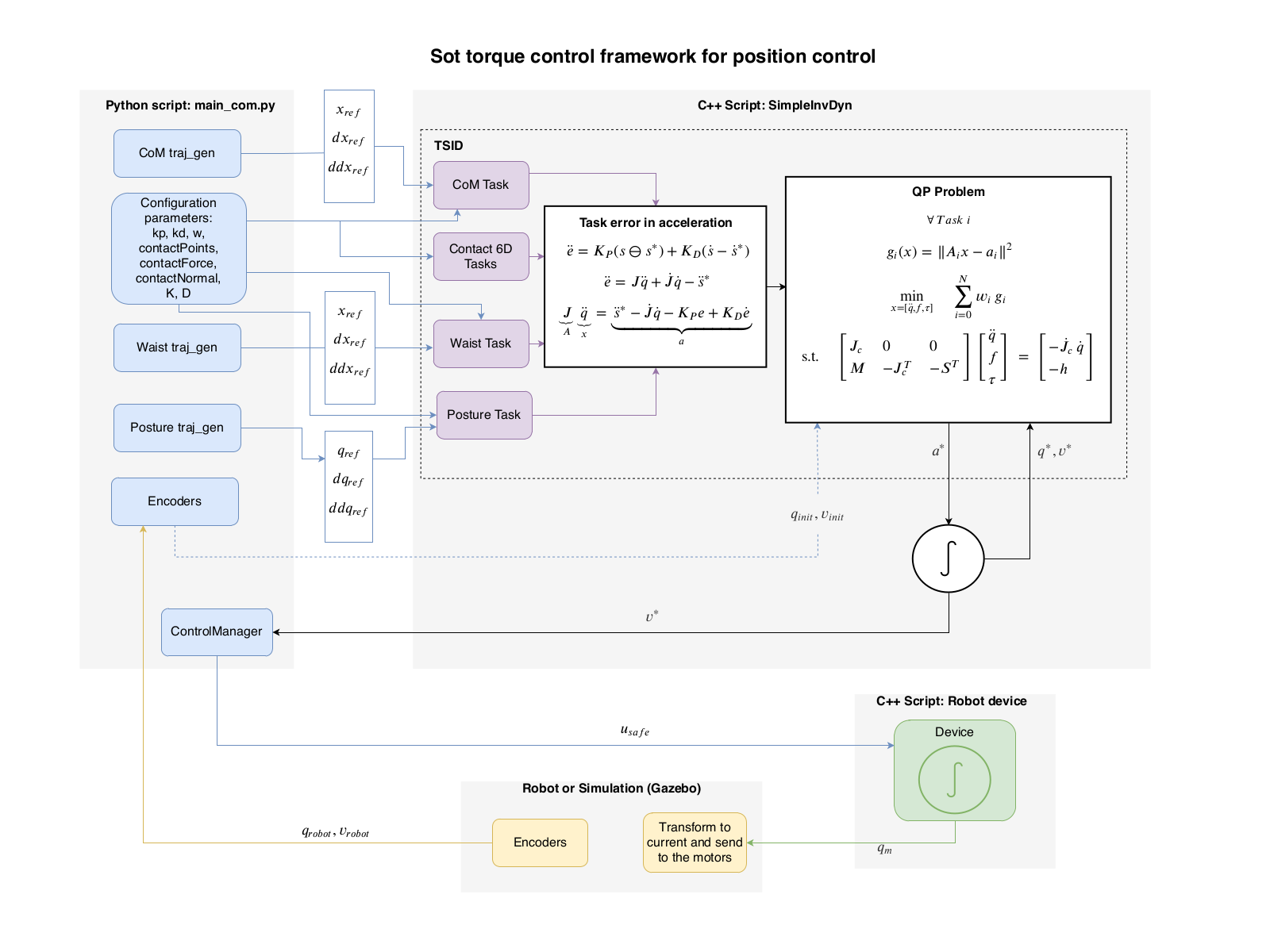
This will launch a test routine executing a sinusoid on the CoM of the robot in position control (you should have started the SoT in position mode). It also saves the dynamic graph in /tmp/sot_talos_tsid_com.pdf.
For torque control simply run:

These two examples replicate the ex2 of the TSID jupyter notebooks in position and torque control in Gazebo (see the jupyter here).
If you want to dynamically interact with the graph
More information on how to use the SoT and how to work on Talos can be found in the robot wiki page (you need LAAS permissions to access this).
 1.8.17
1.8.17