#include <hpp/constraints/differentiable-function.hh>
Public Member Functions | |
| virtual | ~DifferentiableFunction () |
| LiegroupElement | operator() (vectorIn_t argument) const |
| void | value (LiegroupElementRef result, vectorIn_t argument) const |
| void | jacobian (matrixOut_t jacobian, vectorIn_t argument) const |
| const ArrayXb & | activeParameters () const |
| const ArrayXb & | activeDerivativeParameters () const |
| size_type | inputSize () const |
| Get dimension of input vector. More... | |
| size_type | inputDerivativeSize () const |
| LiegroupSpacePtr_t | outputSpace () const |
| Get output space. More... | |
| size_type | outputSize () const |
| Get dimension of output vector. More... | |
| size_type | outputDerivativeSize () const |
| Get dimension of output derivative vector. More... | |
| const std::string & | name () const |
| Get function name. More... | |
| virtual std::ostream & | print (std::ostream &o) const |
| Display object in a stream. More... | |
| std::string | context () const |
| void | context (const std::string &c) |
| void | finiteDifferenceForward (matrixOut_t jacobian, vectorIn_t arg, DevicePtr_t robot=DevicePtr_t(), value_type eps=std::sqrt(Eigen::NumTraits< value_type >::epsilon())) const |
| void | finiteDifferenceCentral (matrixOut_t jacobian, vectorIn_t arg, DevicePtr_t robot=DevicePtr_t(), value_type eps=std::sqrt(Eigen::NumTraits< value_type >::epsilon())) const |
Protected Member Functions | |
| DifferentiableFunction (size_type sizeInput, size_type sizeInputDerivative, size_type sizeOutput, std::string name=std::string()) | |
| Concrete class constructor should call this constructor. More... | |
| DifferentiableFunction (size_type sizeInput, size_type sizeInputDerivative, const LiegroupSpacePtr_t &outputSpace, std::string name=std::string()) | |
| Concrete class constructor should call this constructor. More... | |
| virtual void | impl_compute (LiegroupElementRef result, vectorIn_t argument) const =0 |
| User implementation of function evaluation. More... | |
| virtual void | impl_jacobian (matrixOut_t jacobian, vectorIn_t arg) const =0 |
Protected Attributes | |
| size_type | inputSize_ |
| Dimension of input vector. More... | |
| size_type | inputDerivativeSize_ |
| Dimension of input derivative. More... | |
| LiegroupSpacePtr_t | outputSpace_ |
| Dimension of output vector. More... | |
| ArrayXb | activeParameters_ |
| ArrayXb | activeDerivativeParameters_ |
Friends | |
| class | DifferentiableFunctionSet |
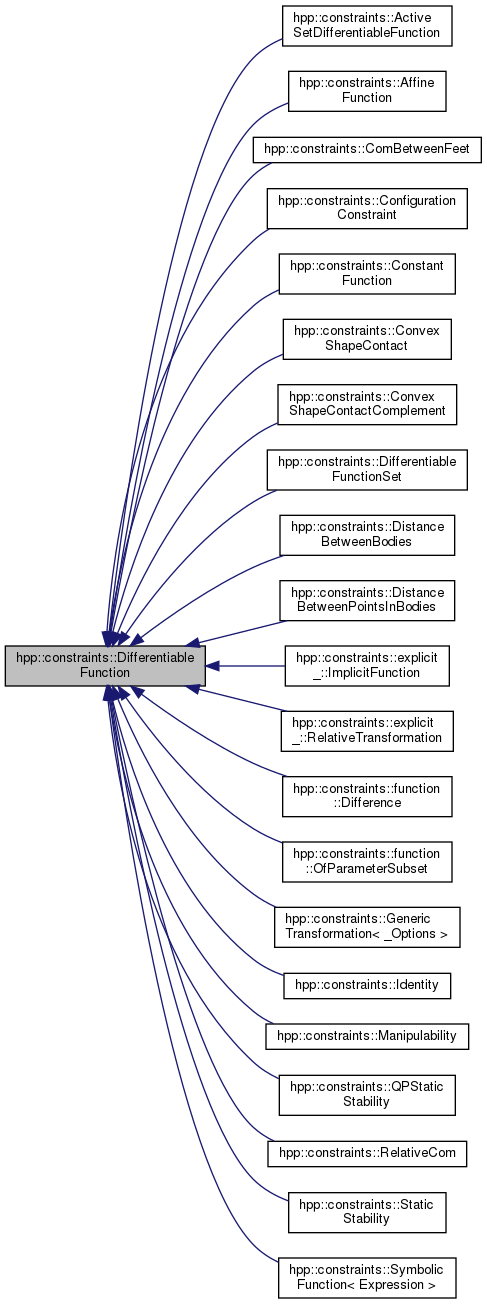
Detailed Description
Differentiable function from a Lie group, for instance the configuration space of a robot (hpp::pinocchio::Device) to a another Lie group.
Note that the input Lie group is only represented by the sizes of the elements and of the velocities: methods inputSize and inputDerivativeSize
The output space can be accessed by method outputSpace.
The value of the function for a given input can be accessed by method value . The Jacobian of the function for a given input can be accessed by method jacobian .
Constructor & Destructor Documentation
◆ ~DifferentiableFunction()
|
inlinevirtual |
◆ DifferentiableFunction() [1/2]
|
protected |
Concrete class constructor should call this constructor.
- Parameters
-
sizeInput dimension of the function input sizeInputDerivative dimension of the function input derivative, sizeOutput dimension of the output, name function's name
◆ DifferentiableFunction() [2/2]
|
protected |
Concrete class constructor should call this constructor.
- Parameters
-
sizeInput dimension of the function input sizeInputDerivative dimension of the function input derivative, outputSpace output space of the function. name function name
Member Function Documentation
◆ activeDerivativeParameters()
|
inline |
Returns a vector of booleans that indicates whether the corresponding velocity parameter influences this constraints.
◆ activeParameters()
|
inline |
Returns a vector of booleans that indicates whether the corresponding configuration parameter influences this constraints.
◆ context() [1/2]
|
inline |
◆ context() [2/2]
|
inline |
◆ finiteDifferenceCentral()
| void hpp::constraints::DifferentiableFunction::finiteDifferenceCentral | ( | matrixOut_t | jacobian, |
| vectorIn_t | arg, | ||
| DevicePtr_t | robot = DevicePtr_t(), |
||
| value_type | eps = std::sqrt(Eigen::NumTraits< value_type >::epsilon()) |
||
| ) | const |
Approximate the jacobian using forward finite difference.
- Return values
-
jacobian jacobian will be stored in this argument
- Parameters
-
arg point at which the jacobian will be computed robot use to add configuration and velocities. If set to NULL, the configuration space is considered a vector space. eps refers to \(\epsilon\) in http://en.wikipedia.org/wiki/Numerical_differentiation Evaluate the function 2*x.size() times but more precise the finiteDifferenceForward
◆ finiteDifferenceForward()
| void hpp::constraints::DifferentiableFunction::finiteDifferenceForward | ( | matrixOut_t | jacobian, |
| vectorIn_t | arg, | ||
| DevicePtr_t | robot = DevicePtr_t(), |
||
| value_type | eps = std::sqrt(Eigen::NumTraits< value_type >::epsilon()) |
||
| ) | const |
Approximate the jacobian using forward finite difference.
- Return values
-
jacobian jacobian will be stored in this argument
- Parameters
-
arg point at which the jacobian will be computed robot use to add configuration and velocities. If set to NULL, the configuration space is considered a vector space. eps refers to \(\epsilon\) in http://en.wikipedia.org/wiki/Numerical_differentiation Evaluate the function (x.size() + 1) times but less precise the finiteDifferenceCentral
◆ impl_compute()
|
protectedpure virtual |
User implementation of function evaluation.
Implemented in hpp::constraints::ConstantFunction, hpp::constraints::explicit_::RelativeTransformation, hpp::constraints::explicit_::ImplicitFunction, hpp::constraints::ActiveSetDifferentiableFunction, hpp::constraints::function::OfParameterSubset, hpp::constraints::Manipulability, hpp::constraints::Identity, and hpp::constraints::function::Difference.
◆ impl_jacobian()
|
protectedpure virtual |
Implemented in hpp::constraints::ConstantFunction, hpp::constraints::explicit_::RelativeTransformation, hpp::constraints::explicit_::ImplicitFunction, hpp::constraints::ActiveSetDifferentiableFunction, hpp::constraints::function::OfParameterSubset, hpp::constraints::Manipulability, hpp::constraints::Identity, and hpp::constraints::function::Difference.
◆ inputDerivativeSize()
|
inline |
Get dimension of input derivative vector
The dimension of configuration vectors might differ from the dimension of velocity vectors since some joints are represented by non minimal size vectors: e.g. quaternion for SO(3)
◆ inputSize()
|
inline |
Get dimension of input vector.
◆ jacobian()
|
inline |
Computes the jacobian.
- Return values
-
jacobian jacobian will be stored in this argument
- Parameters
-
argument point at which the jacobian will be computed
◆ name()
|
inline |
Get function name.
- Returns
- Function name.
◆ operator()()
|
inline |
Evaluate the function at a given parameter.
- Note
- parameters should be of the correct size.
◆ outputDerivativeSize()
|
inline |
Get dimension of output derivative vector.
◆ outputSize()
|
inline |
Get dimension of output vector.
◆ outputSpace()
|
inline |
Get output space.
◆ print()
|
virtual |
Display object in a stream.
Reimplemented in hpp::constraints::GenericTransformation< _Options >, hpp::constraints::ConvexShapeContact, hpp::constraints::DifferentiableFunctionSet, hpp::constraints::RelativeCom, hpp::constraints::function::OfParameterSubset, and hpp::constraints::function::Difference.
◆ value()
|
inline |
Evaluate the function at a given parameter.
- Note
- parameters should be of the correct size.
Friends And Related Function Documentation
◆ DifferentiableFunctionSet
|
friend |
Member Data Documentation
◆ activeDerivativeParameters_
|
protected |
Initialized to true by this class. Child class are responsible for updating it.
- See also
- activeDerivativeParameters
◆ activeParameters_
|
protected |
Initialized to true by this class. Child class are responsible for updating it.
- See also
- activeParameters
◆ inputDerivativeSize_
|
protected |
Dimension of input derivative.
◆ inputSize_
|
protected |
Dimension of input vector.
◆ outputSpace_
|
protected |
Dimension of output vector.
The documentation for this class was generated from the following file:
- include/hpp/constraints/differentiable-function.hh
