Loading...
Searching...
No Matches
common_solve_methods.hh File Reference
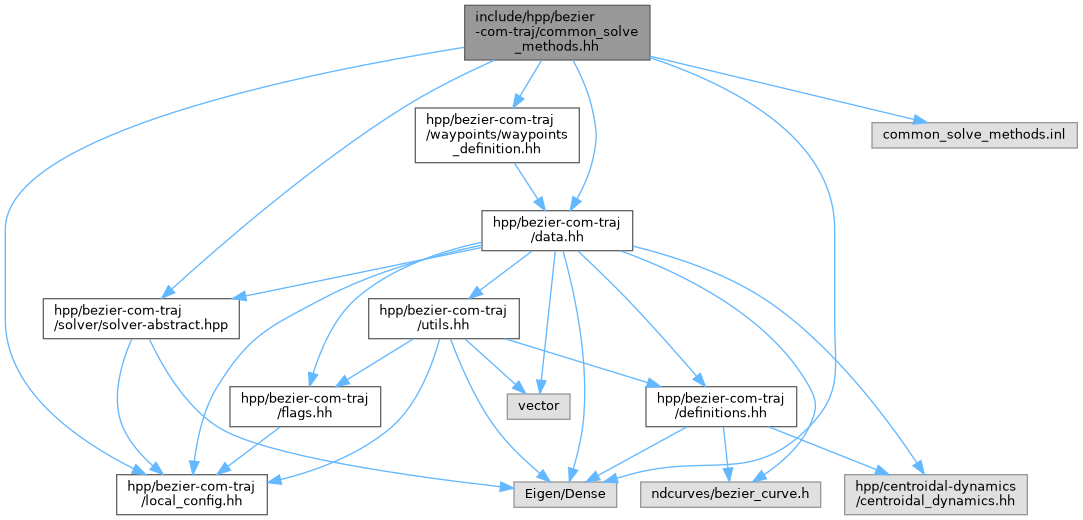
#include <Eigen/Dense>#include <hpp/bezier-com-traj/data.hh>#include <hpp/bezier-com-traj/local_config.hh>#include <hpp/bezier-com-traj/solver/solver-abstract.hpp>#include <hpp/bezier-com-traj/waypoints/waypoints_definition.hh>#include "common_solve_methods.inl"
Include dependency graph for common_solve_methods.hh:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | bezier_com_traj |
Functions | |
| BEZIER_COM_TRAJ_DLLAPI std::vector< waypoint6_t > | bezier_com_traj::ComputeDiscretizedWaypoints (const std::vector< waypoint6_t > &wps, const std::vector< ndcurves::Bern< double > > &bernstein, int numSteps) |
| ComputeDiscretizedWaypoints Given the waypoints defining a bezier curve, computes a discretization of the curve. | |
| BEZIER_COM_TRAJ_DLLAPI std::pair< MatrixXX, VectorX > | bezier_com_traj::compute6dControlPointInequalities (const ContactData &cData, const std::vector< waypoint6_t > &wps, const std::vector< waypoint6_t > &wpL, const bool useAngMomentum, bool &fail) |
| compute6dControlPointInequalities Given linear and angular control waypoints, compute the inequality matrices A and b, A x <= b that constrain the desired control point x. | |
| BEZIER_COM_TRAJ_DLLAPI std::pair< MatrixXX, VectorX > | bezier_com_traj::compute6dControlPointEqualities (const ContactData &cData, const std::vector< waypoint6_t > &wps, const std::vector< waypoint6_t > &wpL, const bool useAngMomentum, bool &fail) |
| compute6dControlPointEqualities Given linear and angular control waypoints, compute the equality matrices D and d, D [x; Beta]' = d that constrain the desired control point x and contact forces Beta. | |
| BEZIER_COM_TRAJ_DLLAPI ResultData | bezier_com_traj::solve (Cref_matrixXX A, Cref_vectorX b, Cref_matrixXX H, Cref_vectorX g, Cref_vectorX initGuess, Cref_vectorX minBounds, Cref_vectorX maxBounds, const solvers::SolverType solver=solvers::SOLVER_QUADPROG) |
| solve x' h x + 2 g' x, subject to A*x <= b using quadprog | |
| BEZIER_COM_TRAJ_DLLAPI ResultData | bezier_com_traj::solve (Cref_matrixXX A, Cref_vectorX b, Cref_matrixXX D, Cref_vectorX d, Cref_matrixXX H, Cref_vectorX g, Cref_vectorX initGuess, const solvers::SolverType solver=solvers::SOLVER_QUADPROG) |
| solve x' h x + 2 g' x, subject to A*x <= b and D*x = c using quadprog | |
| BEZIER_COM_TRAJ_DLLAPI ResultData | bezier_com_traj::solve (const std::pair< MatrixXX, VectorX > &Ab, const std::pair< MatrixXX, VectorX > &Hg, const VectorX &init, const solvers::SolverType solver=solvers::SOLVER_QUADPROG) |
| solve x' h x + 2 g' x, subject to A*x <= b using quadprog, with x of fixed dimension 3 | |
| BEZIER_COM_TRAJ_DLLAPI ResultData | bezier_com_traj::solve (const std::pair< MatrixXX, VectorX > &Ab, const std::pair< MatrixXX, VectorX > &Dd, const std::pair< MatrixXX, VectorX > &Hg, Cref_vectorX minBounds, Cref_vectorX maxBounds, const VectorX &init, const solvers::SolverType solver=solvers::SOLVER_QUADPROG) |
| solve x' h x + 2 g' x, subject to A*x <= b and D*x = c using quadprog, with x of fixed dimension 3 | |
| template<typename Point > | |
| BEZIER_COM_TRAJ_DLLAPI std::vector< std::pair< double, Point > > | bezier_com_traj::computeDiscretizedWaypoints (const ProblemData &pData, double T, const T_time &timeArray) |
| template<typename Point > | |
| BEZIER_COM_TRAJ_DLLAPI std::vector< std::pair< double, Point > > | bezier_com_traj::computeDiscretizedAccelerationWaypoints (const ProblemData &pData, double T, const T_time &timeArray) |