Loading...
Searching...
No Matches
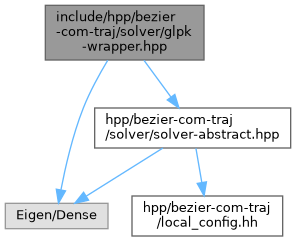
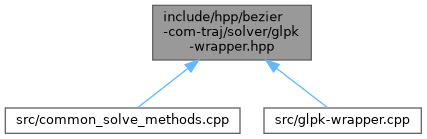
glpk-wrapper.hpp File Reference
Include dependency graph for glpk-wrapper.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | solvers |
Functions | |
| int | solvers::solveglpk (const VectorXd &g0, const MatrixXd &CE, const VectorXd &ce0, const MatrixXd &CI, const VectorXd &ci0, solvers::Cref_vectorX minBounds, solvers::Cref_vectorX maxBounds, VectorXd &x, double &cost) |