Loading...
Searching...
No Matches
locked-joint.hh File Reference
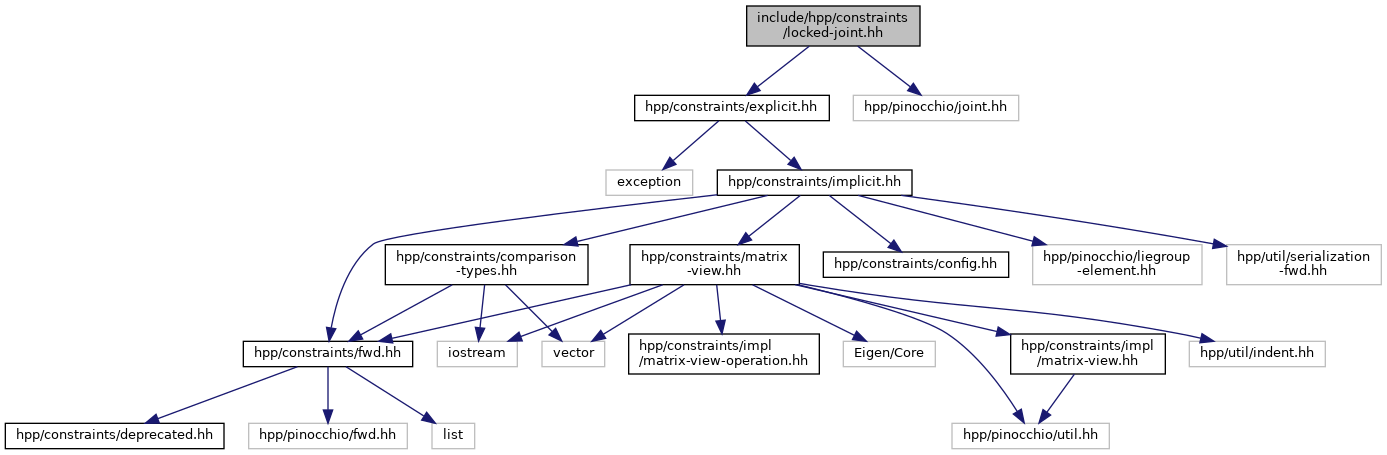
Include dependency graph for locked-joint.hh:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hpp::constraints::LockedJoint |
Namespaces | |
| namespace | hpp |
| namespace | hpp::constraints |
Functions | |
| std::ostream & | hpp::constraints::operator<< (std::ostream &os, const LockedJoint &lj) |