Loading...
Searching...
No Matches
svd.hh File Reference
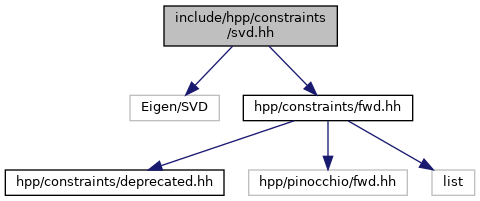
Include dependency graph for svd.hh:
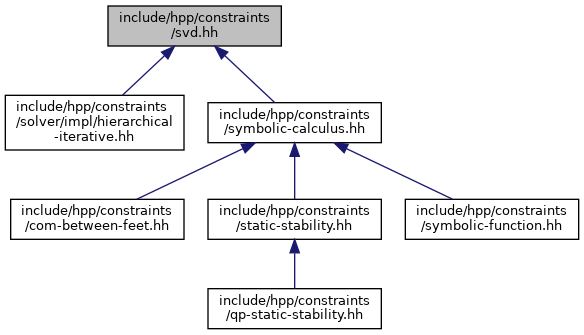
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | hpp |
| namespace | hpp::constraints |
Functions | |
| template<typename SVD > | |
| void | hpp::constraints::projectorOnSpan (const SVD &svd, Eigen::Ref< typename SVD::MatrixType > projector) |
| template<typename SVD > | |
| void | hpp::constraints::projectorOnSpanOfInv (const SVD &svd, Eigen::Ref< typename SVD::MatrixType > projector) |
| template<typename SVD > | |
| void | hpp::constraints::projectorOnKernel (const SVD &svd, Eigen::Ref< typename SVD::MatrixType > projector, const bool &computeFullV=false) |
| template<typename SVD > | |
| void | hpp::constraints::projectorOnKernelOfInv (const SVD &svd, Eigen::Ref< typename SVD::MatrixType > projector, const bool &computeFullU=false) |