hpp::core::PathOptimizer Class Referenceabstract
#include <hpp/core/path-optimizer.hh>
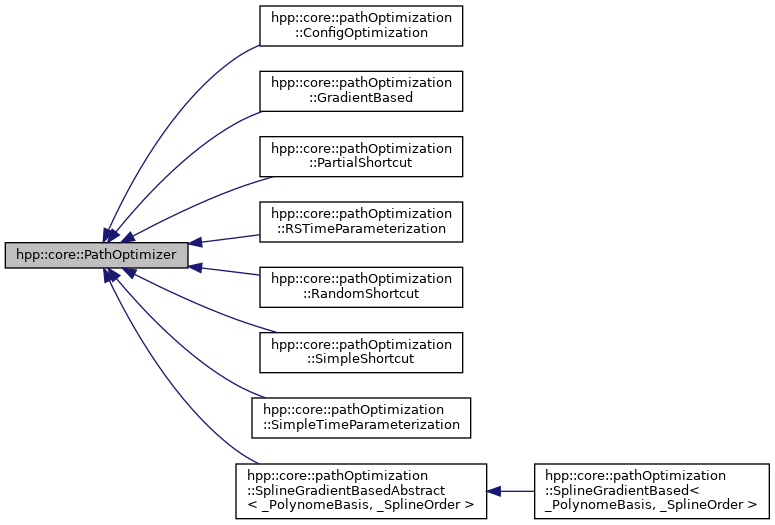
Inheritance diagram for hpp::core::PathOptimizer:
Public Member Functions | |
| virtual | ~PathOptimizer () |
| ProblemConstPtr_t | problem () const |
| Get problem. More... | |
| virtual PathVectorPtr_t | optimize (const PathVectorPtr_t &path)=0 |
| Optimize path. More... | |
| void | interrupt () |
| Interrupt path optimization. More... | |
| void | maxIterations (const unsigned long int &n) |
| Set maximal number of iterations. More... | |
| void | timeOut (const double &timeOut) |
| set time out (in seconds) More... | |
Protected Member Functions | |
| PathOptimizer (const ProblemConstPtr_t &problem) | |
| PathPtr_t | steer (ConfigurationIn_t q1, ConfigurationIn_t q2) const |
| void | monitorExecution () |
| void | endIteration () |
| bool | shouldStop () const |
| void | initFromParameters () |
Protected Attributes | |
| bool | interrupt_ |
Detailed Description
Abstraction of path optimizer
The documentation for this class was generated from the following file:
- include/hpp/core/path-optimizer.hh