interpolated-steering-method.hh File Reference
#include <hpp/core/interpolated-path.hh>#include <hpp/core/steering-method.hh>#include <hpp/core/steering-method/fwd.hh>#include <hpp/core/weighed-distance.hh>
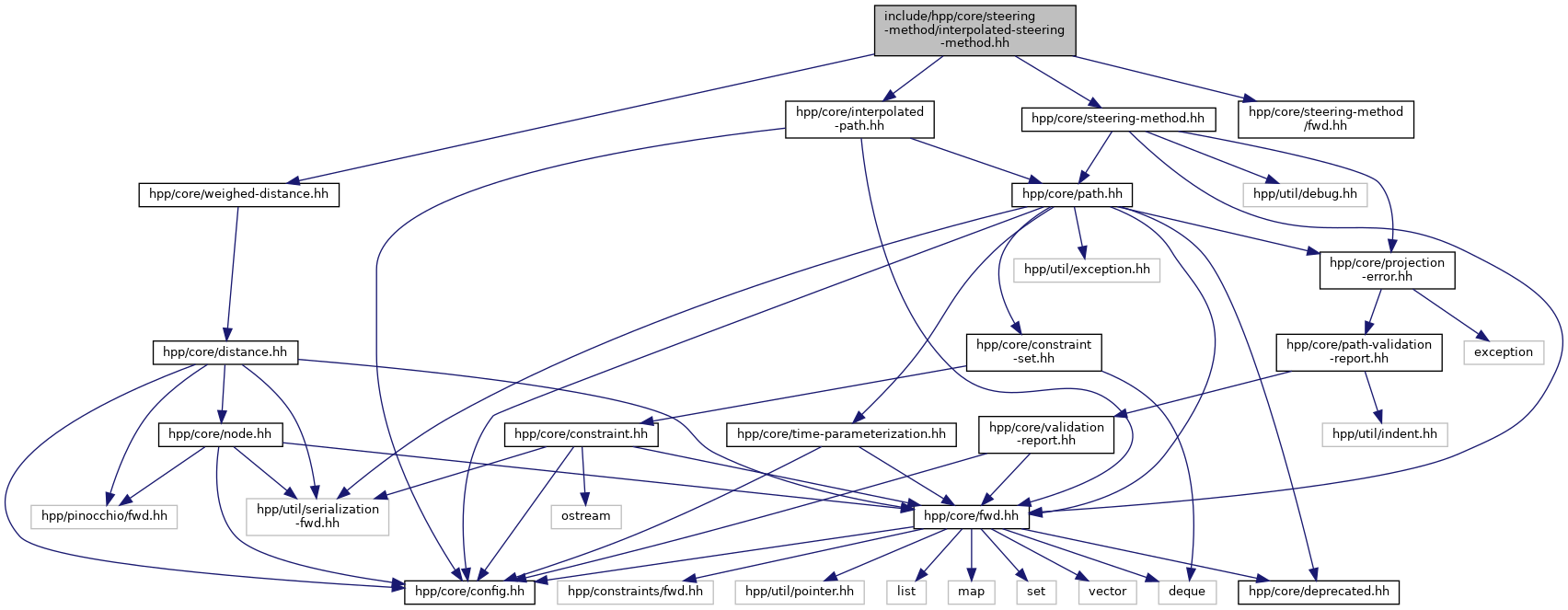
Include dependency graph for interpolated-steering-method.hh:
Go to the source code of this file.
Classes | |
| class | hpp::core::steeringMethod::Interpolated |
Namespaces | |
| hpp | |
| hpp::core | |
| hpp::core::steeringMethod | |