uniform-tpl.hxx File Reference
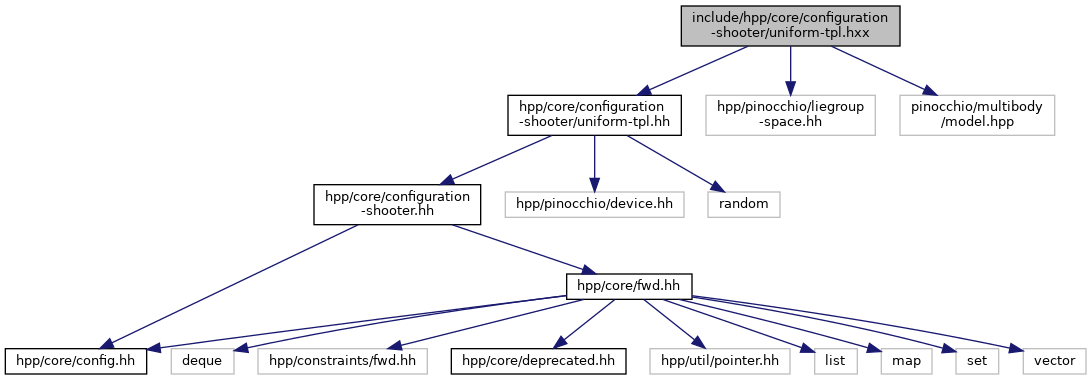
#include <hpp/core/configuration-shooter/uniform-tpl.hh>#include <hpp/pinocchio/liegroup-space.hh>#include <pinocchio/multibody/model.hpp>
Include dependency graph for uniform-tpl.hxx:
Go to the source code of this file.
Namespaces | |
| hpp | |
| hpp::core | |
| hpp::core::configurationShooter | |