Loading...
Searching...
No Matches
MathDefs.h File Reference
#include <Eigen/Dense>#include <Eigen/SVD>#include <utility>#include <vector>
Include dependency graph for MathDefs.h:
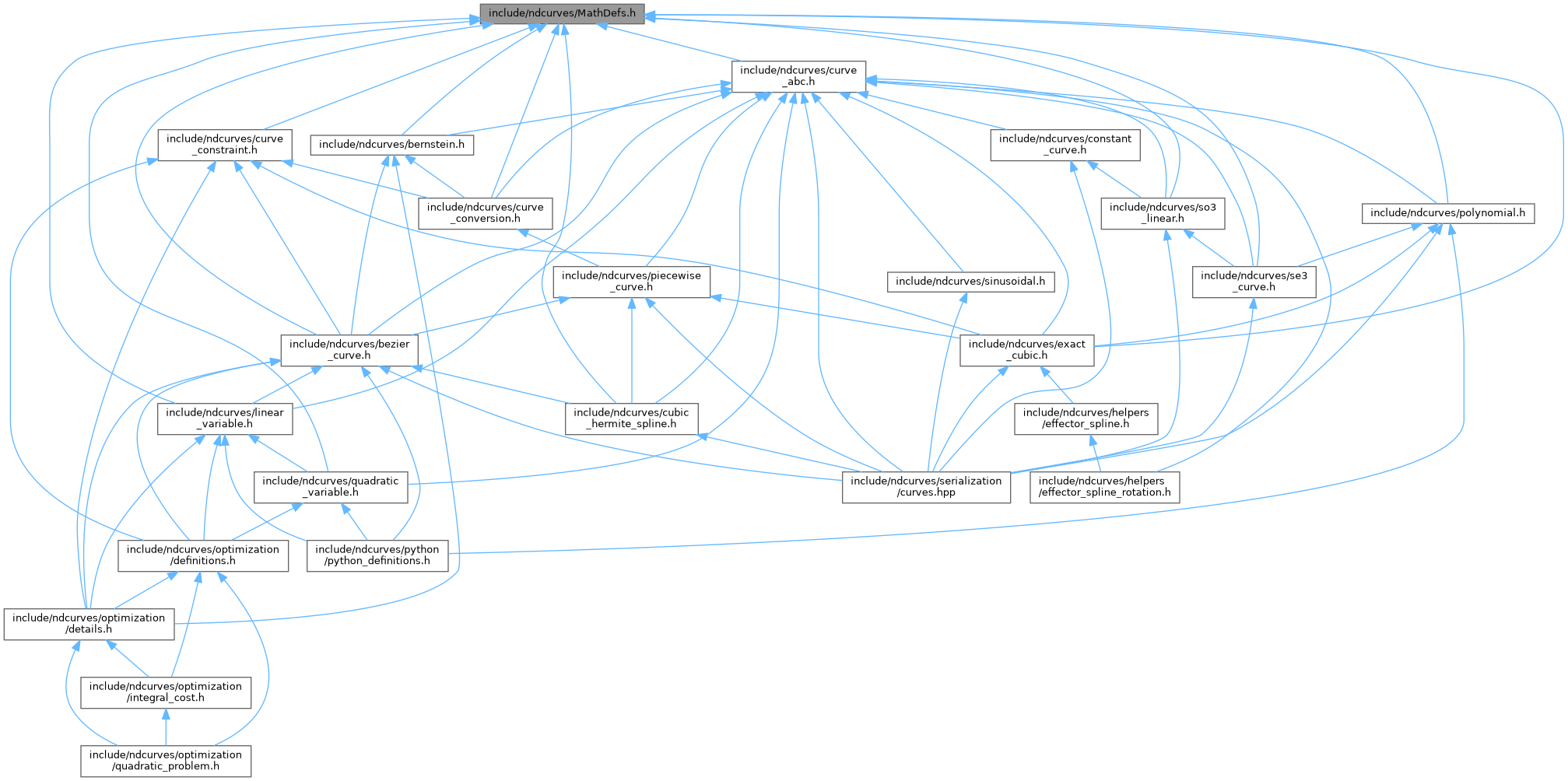
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | ndcurves |
Functions | |
| template<typename _Matrix_Type_ > | |
| void | ndcurves::PseudoInverse (_Matrix_Type_ &pinvmat) |
| An inverse kinematics architecture enforcing an arbitrary number of strict priority levels (Reference : Boulic et Al. 2003) | |
| template<typename Matrix3 , typename Point > | |
| Matrix3 | ndcurves::skew (const Point &x) |
