Loading...
Searching...
No Matches
integral_cost.h File Reference
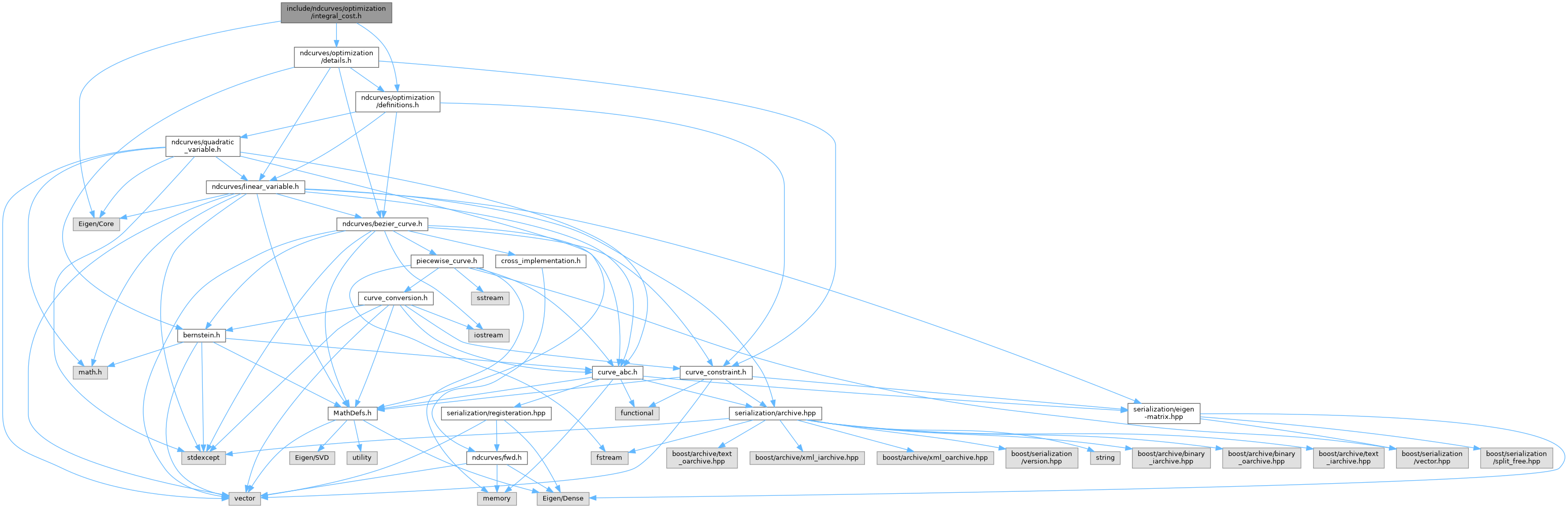
#include <Eigen/Core>#include "ndcurves/optimization/definitions.h"#include "ndcurves/optimization/details.h"
Include dependency graph for integral_cost.h:
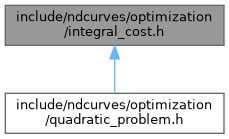
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | ndcurves |
| namespace | ndcurves::optimization |
Enumerations | |
| enum | ndcurves::optimization::integral_cost_flag { ndcurves::optimization::DISTANCE = 0x000 , ndcurves::optimization::VELOCITY = 0x001 , ndcurves::optimization::ACCELERATION = 0x002 , ndcurves::optimization::JERK = 0x003 , ndcurves::optimization::FOURTH = 0x004 , ndcurves::optimization::FIFTH = 0x005 } |
Functions | |
| template<typename Point , typename Numeric > | |
| quadratic_variable< Numeric > | ndcurves::optimization::compute_integral_cost_internal (const problem_data< Point, Numeric > &pData, const std::size_t num_derivate) |
| template<typename Point , typename Numeric > | |
| quadratic_variable< Numeric > | ndcurves::optimization::compute_integral_cost (const problem_data< Point, Numeric > &pData, const integral_cost_flag flag) |
