Loading...
Searching...
No Matches
se3_curve.h File Reference
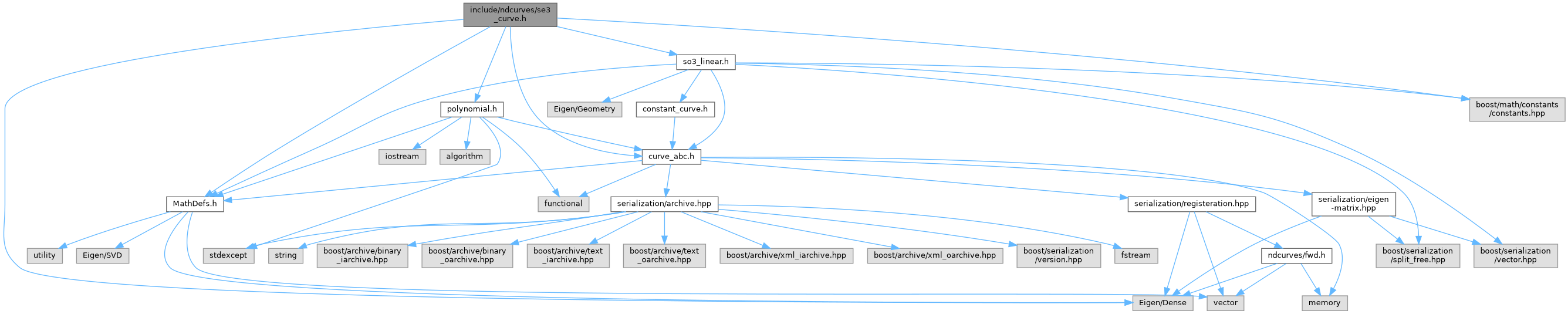
#include <Eigen/Dense>#include <boost/math/constants/constants.hpp>#include "MathDefs.h"#include "curve_abc.h"#include "polynomial.h"#include "so3_linear.h"
Include dependency graph for se3_curve.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ndcurves::SE3Curve< Time, Numeric, Safe > |
| Composition of a curve of any type of dimension 3 and a curve representing an rotation (in current implementation, only SO3Linear can be used for the rotation part) The output is a vector of size 7 (pos_x,pos_y,pos_z,quat_x,quat_y,quat_z,quat_w) The output of the derivative of any order is a vector of size 6 (linear_x,linear_y,linear_z,angular_x,angular_y,angular_z) More... | |
Namespaces | |
| namespace | ndcurves |
