ZMPPreviewControlWithMultiBodyZMP.cpp File Reference
This object generate all the values for the foot trajectories, and the desired ZMP based on a sequence of steps. More...
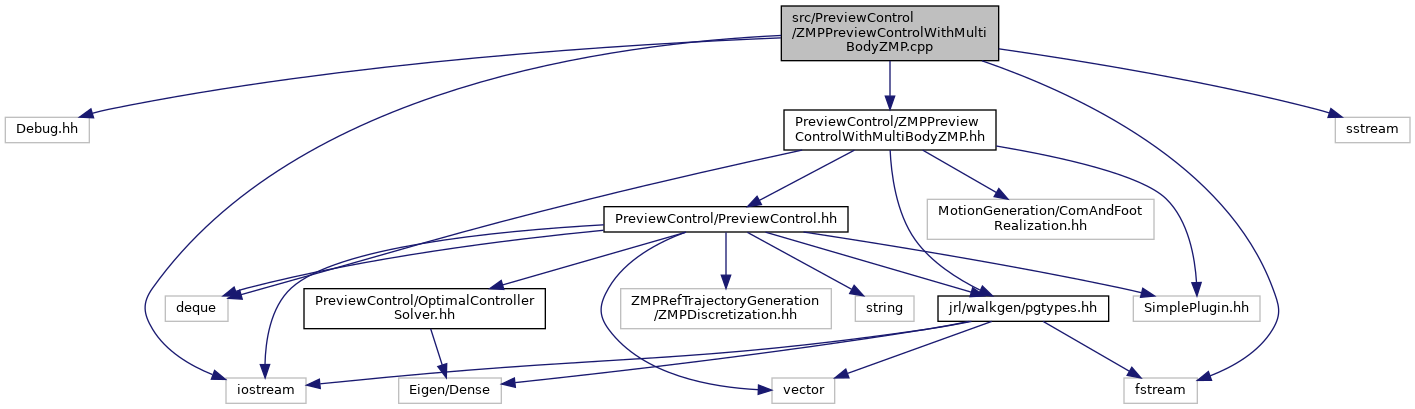
#include <Debug.hh>#include <PreviewControl/ZMPPreviewControlWithMultiBodyZMP.hh>#include <fstream>#include <iostream>#include <sstream>
Include dependency graph for ZMPPreviewControlWithMultiBodyZMP.cpp:
Detailed Description
This object generate all the values for the foot trajectories, and the desired ZMP based on a sequence of steps.
