LinearizedInvertedPendulum2D.cpp File Reference
#include <Debug.hh>#include <PreviewControl/LinearizedInvertedPendulum2D.hh>#include <fstream>#include <iostream>
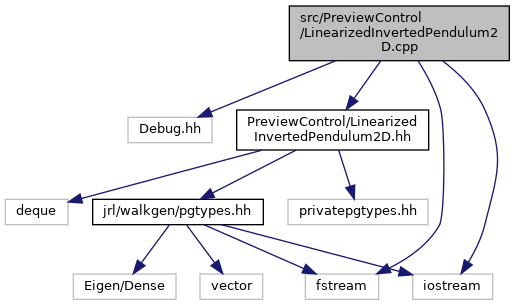
Include dependency graph for LinearizedInvertedPendulum2D.cpp:
#include <Debug.hh>#include <PreviewControl/LinearizedInvertedPendulum2D.hh>#include <fstream>#include <iostream> 1.8.17
1.8.17