StepOverPolynome.hh File Reference
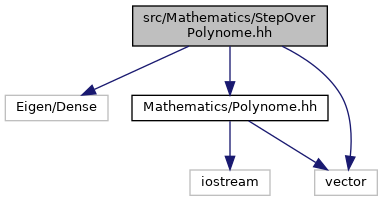
Include dependency graph for StepOverPolynome.hh:
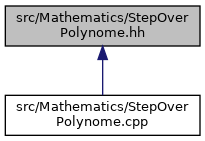
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PatternGeneratorJRL::StepOverPolynomeFoot |
| Polynome used for Z trajectory during stepover. More... | |
| class | PatternGeneratorJRL::StepOverPolynomeFootZtoX |
| Polynome used for Z trajectory during stepover. More... | |
| class | PatternGeneratorJRL::StepOverPolynomeFootXtoTime |
| Polynome used for X trajectory in function of time to combine with StepOverPolynomeFootZtoX. More... | |
| class | PatternGeneratorJRL::StepOverPolynomeHip4 |
| Polynome for the hip trajectory. More... | |
| class | PatternGeneratorJRL::StepOverSpline |
| spline function calculation class to calculate cubic splines More... | |
| class | PatternGeneratorJRL::StepOverClampedCubicSpline |
Namespaces | |
| PatternGeneratorJRL | |
| \doc Simulate a rigid body | |
