|
talos-torque-control
1.1.1
Collection of dynamic-graph entities aiming at the implementation of torque control on TALOS.
|


|
|
talos-torque-control
1.1.1
Collection of dynamic-graph entities aiming at the implementation of torque control on TALOS.
|
|
#include <dynamic-graph/factory.h>#include <sot/core/debug.hh>#include <sot/torque-control/talos-common.hh>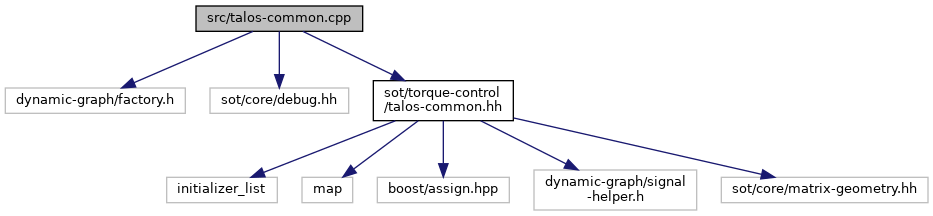
Go to the source code of this file.
Namespaces | |
| dynamicgraph | |
| dynamicgraph::sot | |
| dynamicgraph::sot::torque_control | |
Functions | |
| bool | base_se3_to_sot (dg::sot::ConstRefVector pos, dg::sot::ConstRefMatrix R, dg::sot::RefVector q_sot) |
| bool | base_sot_to_urdf (dg::sot::ConstRefVector q_sot, dg::sot::RefVector q_urdf) |
| bool | base_urdf_to_sot (dg::sot::ConstRefVector q_urdf, dg::sot::RefVector q_sot) |
| bool | config_sot_to_urdf (dg::sot::ConstRefVector q_sot, dg::sot::RefVector q_urdf) |
| bool | config_urdf_to_sot (dg::sot::ConstRefVector q_urdf, dg::sot::RefVector q_sot) |
| bool | joints_sot_to_urdf (dg::sot::ConstRefVector q_sot, dg::sot::RefVector q_urdf) |
| bool | joints_urdf_to_sot (dg::sot::ConstRefVector q_urdf, dg::sot::RefVector q_sot) |
| bool | velocity_sot_to_urdf (dg::sot::ConstRefVector v_sot, dg::sot::RefVector v_urdf) |
| bool | velocity_urdf_to_sot (dg::sot::ConstRefVector v_urdf, dg::sot::RefVector v_sot) |