task-actuation-bounds.hpp File Reference
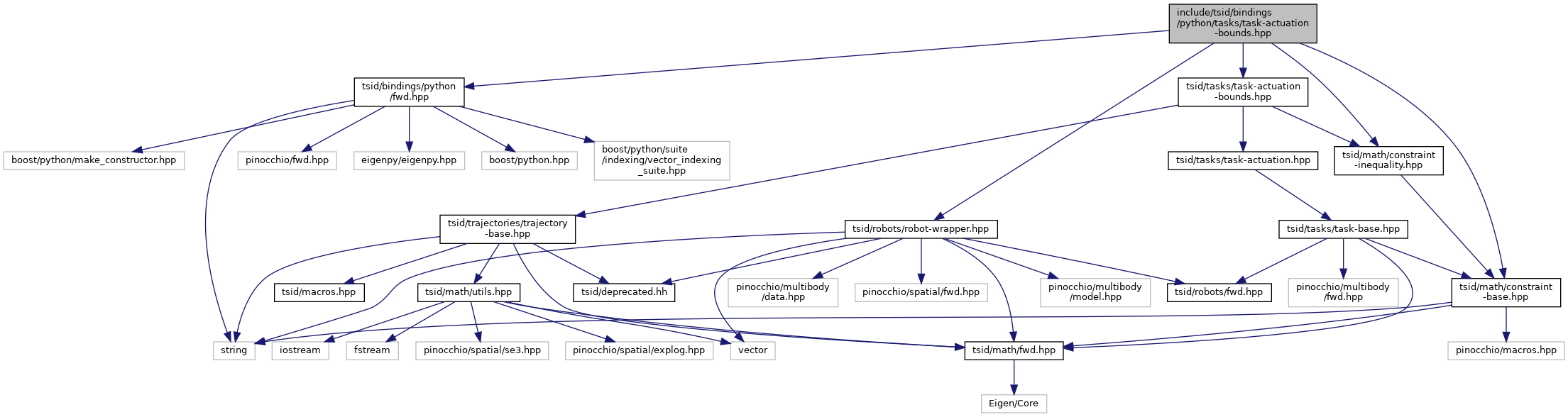
#include "tsid/bindings/python/fwd.hpp"#include "tsid/tasks/task-actuation-bounds.hpp"#include "tsid/robots/robot-wrapper.hpp"#include "tsid/math/constraint-inequality.hpp"#include "tsid/math/constraint-base.hpp"
Include dependency graph for task-actuation-bounds.hpp:
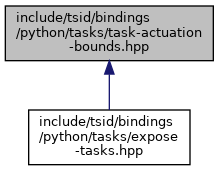
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | tsid::python::TaskActuationBoundsPythonVisitor< Task > |
Namespaces | |
| tsid | |
| tsid::python | |