expose-contact.hpp File Reference
#include "tsid/bindings/python/contacts/contact-6d.hpp"#include "tsid/bindings/python/contacts/contact-point.hpp"#include "tsid/bindings/python/contacts/contact-two-frame-positions.hpp"#include "tsid/bindings/python/contacts/measured-6d-wrench.hpp"
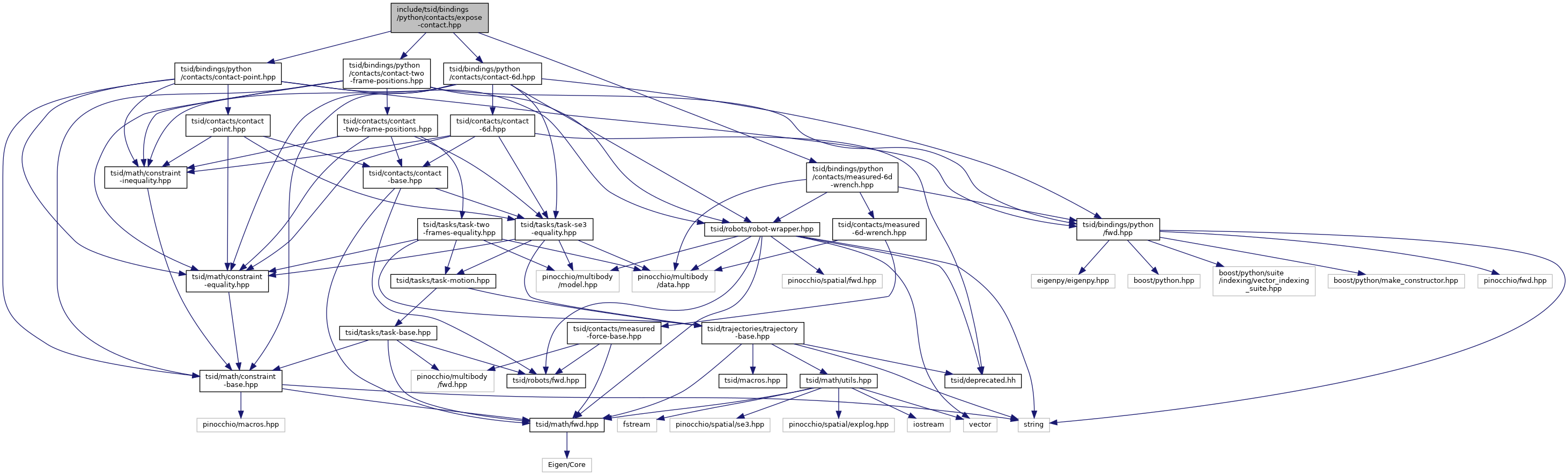
Include dependency graph for expose-contact.hpp:
Go to the source code of this file.
Namespaces | |
| tsid | |
| tsid::python | |
Functions | |
| void | tsid::python::exposeContact6d () |
| void | tsid::python::exposeContactPoint () |
| void | tsid::python::exposeContactTwoFramePositions () |
| void | tsid::python::exposeMeasured6dWrench () |
| void | tsid::python::exposeContact () |