formulation.hpp File Reference
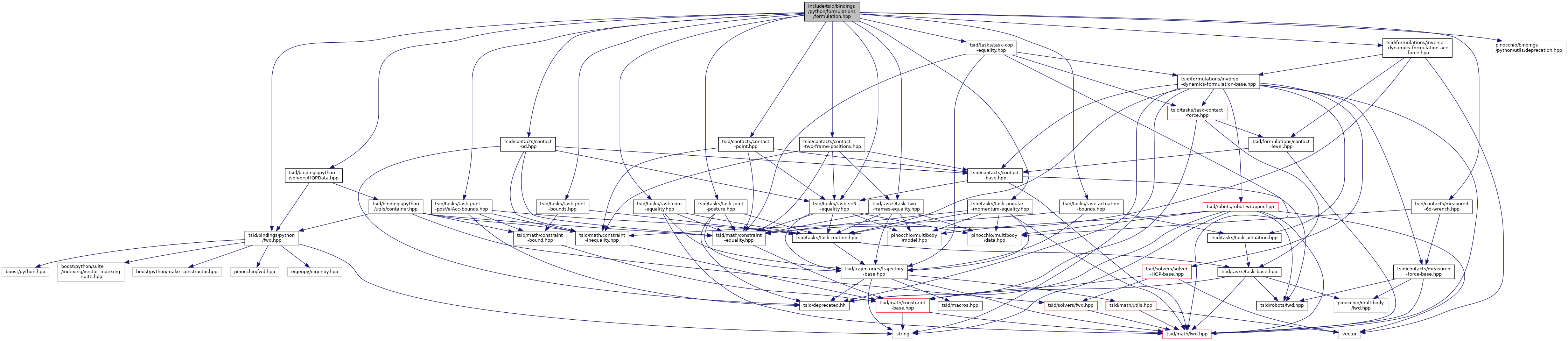
#include "tsid/bindings/python/fwd.hpp"#include <pinocchio/bindings/python/utils/deprecation.hpp>#include "tsid/formulations/inverse-dynamics-formulation-acc-force.hpp"#include "tsid/bindings/python/solvers/HQPData.hpp"#include "tsid/contacts/contact-6d.hpp"#include "tsid/contacts/contact-point.hpp"#include "tsid/contacts/contact-two-frame-positions.hpp"#include "tsid/contacts/measured-6d-wrench.hpp"#include "tsid/tasks/task-joint-posture.hpp"#include "tsid/tasks/task-se3-equality.hpp"#include "tsid/tasks/task-com-equality.hpp"#include "tsid/tasks/task-cop-equality.hpp"#include "tsid/tasks/task-actuation-bounds.hpp"#include "tsid/tasks/task-joint-bounds.hpp"#include "tsid/tasks/task-joint-posVelAcc-bounds.hpp"#include "tsid/tasks/task-angular-momentum-equality.hpp"#include "tsid/tasks/task-two-frames-equality.hpp"
Include dependency graph for formulation.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | tsid::python::InvDynPythonVisitor< T > |
Namespaces | |
| tsid | |
| tsid::python | |