inverse-dynamics-formulation-acc-force.cpp File Reference
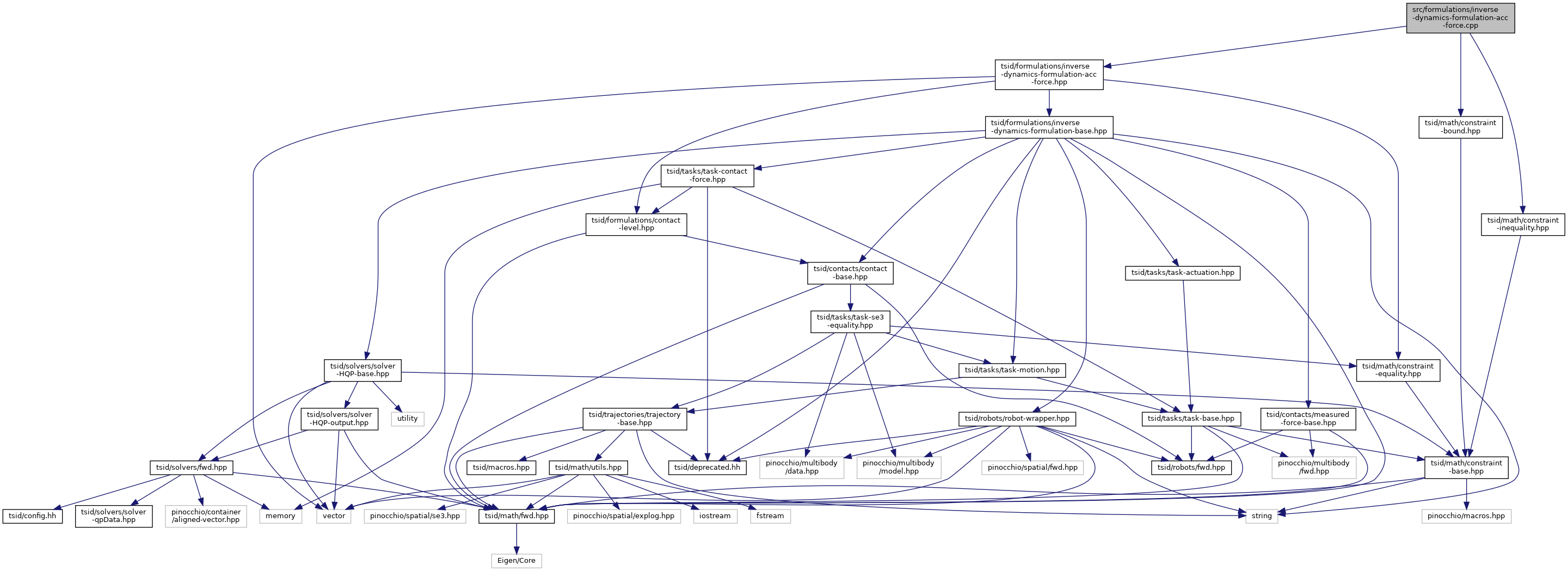
#include "tsid/formulations/inverse-dynamics-formulation-acc-force.hpp"#include "tsid/math/constraint-bound.hpp"#include "tsid/math/constraint-inequality.hpp"
Include dependency graph for inverse-dynamics-formulation-acc-force.cpp:
Typedefs | |
| typedef pinocchio::Data | Data |
Typedef Documentation
◆ Data
| typedef pinocchio::Data Data |