utils.cpp File Reference
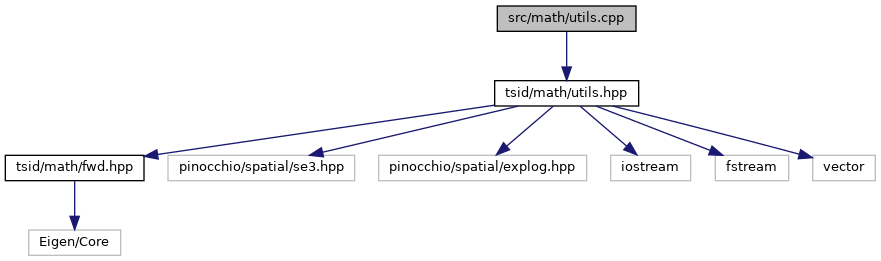
#include <tsid/math/utils.hpp>
Include dependency graph for utils.cpp:
Namespaces | |
| tsid | |
| tsid::math | |
Functions | |
| void | tsid::math::SE3ToXYZQUAT (const pinocchio::SE3 &M, RefVector xyzQuat) |
| void | tsid::math::SE3ToVector (const pinocchio::SE3 &M, RefVector vec) |
| void | tsid::math::vectorToSE3 (RefVector vec, pinocchio::SE3 &M) |
| void | tsid::math::errorInSE3 (const pinocchio::SE3 &M, const pinocchio::SE3 &Mdes, pinocchio::Motion &error) |
| void | tsid::math::solveWithDampingFromSvd (Eigen::JacobiSVD< Eigen::MatrixXd > &svd, ConstRefVector b, RefVector sol, double damping=0.0) |
| void | tsid::math::svdSolveWithDamping (ConstRefMatrix A, ConstRefVector b, RefVector sol, double damping=0.0) |
| void | tsid::math::pseudoInverse (ConstRefMatrix A, RefMatrix Apinv, double tolerance, unsigned int computationOptions=Eigen::ComputeThinU|Eigen::ComputeThinV) |
| void | tsid::math::pseudoInverse (ConstRefMatrix A, Eigen::JacobiSVD< Eigen::MatrixXd > &svdDecomposition, RefMatrix Apinv, double tolerance, unsigned int computationOptions) |
| void | tsid::math::pseudoInverse (ConstRefMatrix A, Eigen::JacobiSVD< Eigen::MatrixXd > &svdDecomposition, RefMatrix Apinv, double tolerance, double *nullSpaceBasisOfA, int &nullSpaceRows, int &nullSpaceCols, unsigned int computationOptions) |
| void | tsid::math::dampedPseudoInverse (ConstRefMatrix A, Eigen::JacobiSVD< Eigen::MatrixXd > &svdDecomposition, RefMatrix Apinv, double tolerance, double dampingFactor, unsigned int computationOptions=Eigen::ComputeThinU|Eigen::ComputeThinV, double *nullSpaceBasisOfA=0, int *nullSpaceRows=0, int *nullSpaceCols=0) |
| void | tsid::math::nullSpaceBasisFromDecomposition (const Eigen::JacobiSVD< Eigen::MatrixXd > &svdDecomposition, double tolerance, double *nullSpaceBasisMatrix, int &rows, int &cols) |
| void | tsid::math::nullSpaceBasisFromDecomposition (const Eigen::JacobiSVD< Eigen::MatrixXd > &svdDecomposition, int rank, double *nullSpaceBasisMatrix, int &rows, int &cols) |