tsid::TaskLevelForce Struct Reference
#include <tsid/formulations/inverse-dynamics-formulation-base.hpp>
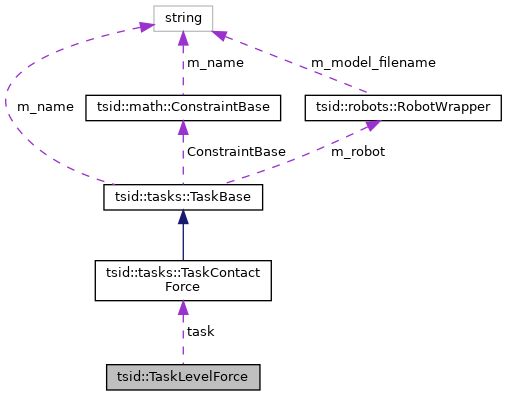
Collaboration diagram for tsid::TaskLevelForce:
Public Member Functions | |
| TaskLevelForce (tasks::TaskContactForce &task, unsigned int priority) | |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW tasks::TaskContactForce & | task |
| std::shared_ptr< math::ConstraintBase > | constraint |
| unsigned int | priority |
Constructor & Destructor Documentation
◆ TaskLevelForce()
| tsid::TaskLevelForce::TaskLevelForce | ( | tasks::TaskContactForce & | task, |
| unsigned int | priority | ||
| ) |
Member Data Documentation
◆ constraint
| std::shared_ptr<math::ConstraintBase> tsid::TaskLevelForce::constraint |
◆ priority
| unsigned int tsid::TaskLevelForce::priority |
◆ task
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW tasks::TaskContactForce& tsid::TaskLevelForce::task |
The documentation for this struct was generated from the following files:
- include/tsid/formulations/inverse-dynamics-formulation-base.hpp
- src/formulations/inverse-dynamics-formulation-base.cpp