request to the collision algorithm More...
#include <hpp/fcl/collision_data.h>
Public Member Functions | |
| CollisionRequest (size_t num_max_contacts_=1, bool enable_contact_=false, bool enable_distance_lower_bound_=false, size_t num_max_cost_sources_=1, bool enable_cost_=false, bool use_approximate_cost_=true, GJKSolverType gjk_solver_type_=GST_LIBCCD) | |
| bool | isSatisfied (const CollisionResult &result) const |
Public Attributes | |
| size_t | num_max_contacts |
| The maximum number of contacts will return. More... | |
| bool | enable_contact |
| whether the contact information (normal, penetration depth and contact position) will return More... | |
| bool | enable_distance_lower_bound |
| Whether a lower bound on distance is returned when objects are disjoint. More... | |
| size_t | num_max_cost_sources |
| The maximum number of cost sources will return. More... | |
| bool | enable_cost |
| whether the cost sources will be computed More... | |
| bool | use_approximate_cost |
| whether the cost computation is approximated More... | |
| GJKSolverType | gjk_solver_type |
| narrow phase solver More... | |
| bool | enable_cached_gjk_guess |
| whether enable gjk intial guess More... | |
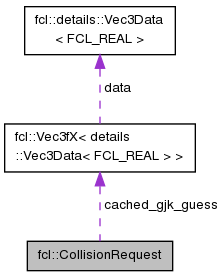
| Vec3f | cached_gjk_guess |
| the gjk intial guess set by user More... | |
request to the collision algorithm
|
inline |
| bool fcl::CollisionRequest::isSatisfied | ( | const CollisionResult & | result | ) | const |
| Vec3f fcl::CollisionRequest::cached_gjk_guess |
the gjk intial guess set by user
| bool fcl::CollisionRequest::enable_cached_gjk_guess |
whether enable gjk intial guess
| bool fcl::CollisionRequest::enable_contact |
whether the contact information (normal, penetration depth and contact position) will return
Referenced by fcl::ShapeCollisionTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::MeshCollisionTraversalNode< OBBRSS >::leafTesting(), fcl::MeshShapeCollisionTraversalNode< OBBRSS, S, NarrowPhaseSolver >::leafTesting(), and fcl::ShapeMeshCollisionTraversalNode< S, kIOS, NarrowPhaseSolver >::leafTesting().
| bool fcl::CollisionRequest::enable_cost |
whether the cost sources will be computed
Referenced by fcl::ShapeCollisionTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::MeshCollisionTraversalNode< OBBRSS >::leafTesting(), fcl::MeshShapeCollisionTraversalNode< OBBRSS, S, NarrowPhaseSolver >::leafTesting(), and fcl::ShapeMeshCollisionTraversalNode< S, kIOS, NarrowPhaseSolver >::leafTesting().
| bool fcl::CollisionRequest::enable_distance_lower_bound |
Whether a lower bound on distance is returned when objects are disjoint.
| GJKSolverType fcl::CollisionRequest::gjk_solver_type |
narrow phase solver
| size_t fcl::CollisionRequest::num_max_contacts |
The maximum number of contacts will return.
Referenced by fcl::MeshContinuousCollisionTraversalNode< BV >::canStop(), fcl::ShapeCollisionTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::MeshCollisionTraversalNode< OBBRSS >::leafTesting(), fcl::MeshShapeCollisionTraversalNode< OBBRSS, S, NarrowPhaseSolver >::leafTesting(), and fcl::ShapeMeshCollisionTraversalNode< S, kIOS, NarrowPhaseSolver >::leafTesting().
| size_t fcl::CollisionRequest::num_max_cost_sources |
The maximum number of cost sources will return.
Referenced by fcl::ShapeCollisionTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::MeshCollisionTraversalNode< OBBRSS >::leafTesting(), fcl::MeshShapeCollisionTraversalNode< OBBRSS, S, NarrowPhaseSolver >::leafTesting(), and fcl::ShapeMeshCollisionTraversalNode< S, kIOS, NarrowPhaseSolver >::leafTesting().
| bool fcl::CollisionRequest::use_approximate_cost |
whether the cost computation is approximated

