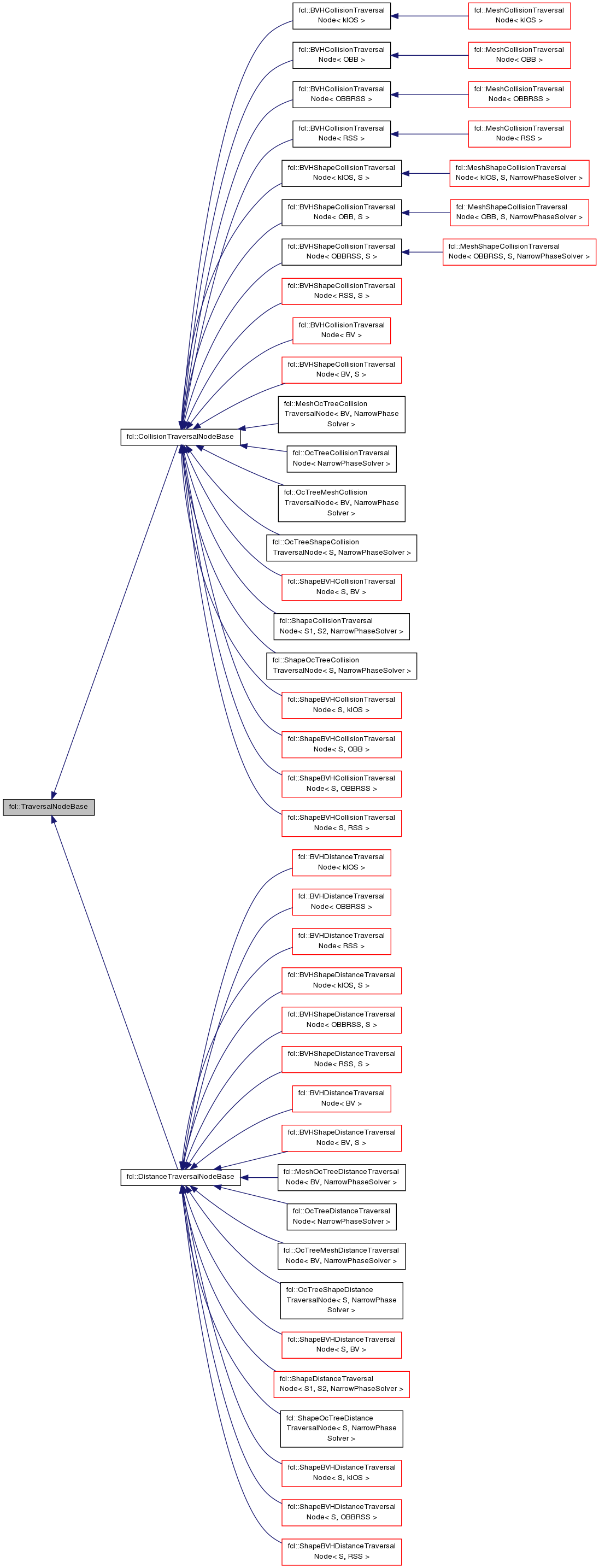
Node structure encoding the information required for traversal. More...
#include <hpp/fcl/traversal/traversal_node_base.h>
Public Member Functions | |
| virtual | ~TraversalNodeBase () |
| virtual void | preprocess () |
| virtual void | postprocess () |
| virtual bool | isFirstNodeLeaf (int b) const |
| Whether b is a leaf node in the first BVH tree. More... | |
| virtual bool | isSecondNodeLeaf (int b) const |
| Whether b is a leaf node in the second BVH tree. More... | |
| virtual bool | firstOverSecond (int b1, int b2) const |
| Traverse the subtree of the node in the first tree first. More... | |
| virtual int | getFirstLeftChild (int b) const |
| Get the left child of the node b in the first tree. More... | |
| virtual int | getFirstRightChild (int b) const |
| Get the right child of the node b in the first tree. More... | |
| virtual int | getSecondLeftChild (int b) const |
| Get the left child of the node b in the second tree. More... | |
| virtual int | getSecondRightChild (int b) const |
| Get the right child of the node b in the second tree. More... | |
| virtual void | enableStatistics (bool enable)=0 |
| Enable statistics (verbose mode) More... | |
Public Attributes | |
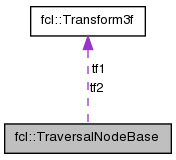
| Transform3f | tf1 |
| configuation of first object More... | |
| Transform3f | tf2 |
| configuration of second object More... | |
Node structure encoding the information required for traversal.
|
virtual |
|
pure virtual |
Enable statistics (verbose mode)
Implemented in fcl::DistanceTraversalNodeBase, and fcl::CollisionTraversalNodeBase.
|
virtual |
Traverse the subtree of the node in the first tree first.
Reimplemented in fcl::BVHDistanceTraversalNode< BV >, fcl::BVHDistanceTraversalNode< kIOS >, fcl::BVHDistanceTraversalNode< RSS >, fcl::BVHDistanceTraversalNode< OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, BV >, fcl::ShapeBVHCollisionTraversalNode< S, OBB >, fcl::ShapeBVHCollisionTraversalNode< S, OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, RSS >, fcl::ShapeBVHCollisionTraversalNode< S, kIOS >, fcl::BVHCollisionTraversalNode< BV >, fcl::BVHCollisionTraversalNode< OBB >, fcl::BVHCollisionTraversalNode< kIOS >, fcl::BVHCollisionTraversalNode< RSS >, and fcl::BVHCollisionTraversalNode< OBBRSS >.
|
virtual |
Get the left child of the node b in the first tree.
Reimplemented in fcl::BVHShapeDistanceTraversalNode< BV, S >, fcl::BVHShapeDistanceTraversalNode< kIOS, S >, fcl::BVHShapeDistanceTraversalNode< OBBRSS, S >, fcl::BVHShapeDistanceTraversalNode< RSS, S >, fcl::BVHDistanceTraversalNode< BV >, fcl::BVHDistanceTraversalNode< kIOS >, fcl::BVHDistanceTraversalNode< RSS >, fcl::BVHDistanceTraversalNode< OBBRSS >, fcl::BVHCollisionTraversalNode< BV >, fcl::BVHCollisionTraversalNode< OBB >, fcl::BVHCollisionTraversalNode< kIOS >, fcl::BVHCollisionTraversalNode< RSS >, fcl::BVHCollisionTraversalNode< OBBRSS >, fcl::BVHShapeCollisionTraversalNode< BV, S >, fcl::BVHShapeCollisionTraversalNode< OBB, S >, fcl::BVHShapeCollisionTraversalNode< kIOS, S >, fcl::BVHShapeCollisionTraversalNode< OBBRSS, S >, and fcl::BVHShapeCollisionTraversalNode< RSS, S >.
|
virtual |
Get the right child of the node b in the first tree.
Reimplemented in fcl::BVHShapeDistanceTraversalNode< BV, S >, fcl::BVHShapeDistanceTraversalNode< kIOS, S >, fcl::BVHShapeDistanceTraversalNode< OBBRSS, S >, fcl::BVHShapeDistanceTraversalNode< RSS, S >, fcl::BVHDistanceTraversalNode< BV >, fcl::BVHDistanceTraversalNode< kIOS >, fcl::BVHDistanceTraversalNode< RSS >, fcl::BVHDistanceTraversalNode< OBBRSS >, fcl::BVHCollisionTraversalNode< BV >, fcl::BVHCollisionTraversalNode< OBB >, fcl::BVHCollisionTraversalNode< kIOS >, fcl::BVHCollisionTraversalNode< RSS >, fcl::BVHCollisionTraversalNode< OBBRSS >, fcl::BVHShapeCollisionTraversalNode< BV, S >, fcl::BVHShapeCollisionTraversalNode< OBB, S >, fcl::BVHShapeCollisionTraversalNode< kIOS, S >, fcl::BVHShapeCollisionTraversalNode< OBBRSS, S >, and fcl::BVHShapeCollisionTraversalNode< RSS, S >.
|
virtual |
Get the left child of the node b in the second tree.
Reimplemented in fcl::ShapeBVHDistanceTraversalNode< S, BV >, fcl::ShapeBVHDistanceTraversalNode< S, OBBRSS >, fcl::ShapeBVHDistanceTraversalNode< S, kIOS >, fcl::ShapeBVHDistanceTraversalNode< S, RSS >, fcl::BVHDistanceTraversalNode< BV >, fcl::BVHDistanceTraversalNode< kIOS >, fcl::BVHDistanceTraversalNode< RSS >, fcl::BVHDistanceTraversalNode< OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, BV >, fcl::ShapeBVHCollisionTraversalNode< S, OBB >, fcl::ShapeBVHCollisionTraversalNode< S, OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, RSS >, fcl::ShapeBVHCollisionTraversalNode< S, kIOS >, fcl::BVHCollisionTraversalNode< BV >, fcl::BVHCollisionTraversalNode< OBB >, fcl::BVHCollisionTraversalNode< kIOS >, fcl::BVHCollisionTraversalNode< RSS >, and fcl::BVHCollisionTraversalNode< OBBRSS >.
|
virtual |
Get the right child of the node b in the second tree.
Reimplemented in fcl::ShapeBVHDistanceTraversalNode< S, BV >, fcl::ShapeBVHDistanceTraversalNode< S, OBBRSS >, fcl::ShapeBVHDistanceTraversalNode< S, kIOS >, fcl::ShapeBVHDistanceTraversalNode< S, RSS >, fcl::BVHDistanceTraversalNode< BV >, fcl::BVHDistanceTraversalNode< kIOS >, fcl::BVHDistanceTraversalNode< RSS >, fcl::BVHDistanceTraversalNode< OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, BV >, fcl::ShapeBVHCollisionTraversalNode< S, OBB >, fcl::ShapeBVHCollisionTraversalNode< S, OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, RSS >, fcl::ShapeBVHCollisionTraversalNode< S, kIOS >, fcl::BVHCollisionTraversalNode< BV >, fcl::BVHCollisionTraversalNode< OBB >, fcl::BVHCollisionTraversalNode< kIOS >, fcl::BVHCollisionTraversalNode< RSS >, and fcl::BVHCollisionTraversalNode< OBBRSS >.
|
virtual |
Whether b is a leaf node in the first BVH tree.
Reimplemented in fcl::BVHShapeDistanceTraversalNode< BV, S >, fcl::BVHShapeDistanceTraversalNode< kIOS, S >, fcl::BVHShapeDistanceTraversalNode< OBBRSS, S >, fcl::BVHShapeDistanceTraversalNode< RSS, S >, fcl::BVHDistanceTraversalNode< BV >, fcl::BVHDistanceTraversalNode< kIOS >, fcl::BVHDistanceTraversalNode< RSS >, fcl::BVHDistanceTraversalNode< OBBRSS >, fcl::BVHCollisionTraversalNode< BV >, fcl::BVHCollisionTraversalNode< OBB >, fcl::BVHCollisionTraversalNode< kIOS >, fcl::BVHCollisionTraversalNode< RSS >, fcl::BVHCollisionTraversalNode< OBBRSS >, fcl::BVHShapeCollisionTraversalNode< BV, S >, fcl::BVHShapeCollisionTraversalNode< OBB, S >, fcl::BVHShapeCollisionTraversalNode< kIOS, S >, fcl::BVHShapeCollisionTraversalNode< OBBRSS, S >, and fcl::BVHShapeCollisionTraversalNode< RSS, S >.
|
virtual |
Whether b is a leaf node in the second BVH tree.
Reimplemented in fcl::ShapeBVHDistanceTraversalNode< S, BV >, fcl::ShapeBVHDistanceTraversalNode< S, OBBRSS >, fcl::ShapeBVHDistanceTraversalNode< S, kIOS >, fcl::ShapeBVHDistanceTraversalNode< S, RSS >, fcl::BVHDistanceTraversalNode< BV >, fcl::BVHDistanceTraversalNode< kIOS >, fcl::BVHDistanceTraversalNode< RSS >, fcl::BVHDistanceTraversalNode< OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, BV >, fcl::ShapeBVHCollisionTraversalNode< S, OBB >, fcl::ShapeBVHCollisionTraversalNode< S, OBBRSS >, fcl::ShapeBVHCollisionTraversalNode< S, RSS >, fcl::ShapeBVHCollisionTraversalNode< S, kIOS >, fcl::BVHCollisionTraversalNode< BV >, fcl::BVHCollisionTraversalNode< OBB >, fcl::BVHCollisionTraversalNode< kIOS >, fcl::BVHCollisionTraversalNode< RSS >, and fcl::BVHCollisionTraversalNode< OBBRSS >.
|
inlinevirtual |
Reimplemented in fcl::ShapeMeshDistanceTraversalNodeOBBRSS< S, NarrowPhaseSolver >, fcl::ShapeMeshDistanceTraversalNodekIOS< S, NarrowPhaseSolver >, fcl::ShapeMeshDistanceTraversalNodeRSS< S, NarrowPhaseSolver >, fcl::MeshShapeDistanceTraversalNodeOBBRSS< S, NarrowPhaseSolver >, fcl::MeshShapeDistanceTraversalNodekIOS< S, NarrowPhaseSolver >, fcl::MeshShapeDistanceTraversalNodeRSS< S, NarrowPhaseSolver >, fcl::MeshDistanceTraversalNodeOBBRSS, fcl::MeshDistanceTraversalNodekIOS, and fcl::MeshDistanceTraversalNodeRSS.
|
inlinevirtual |
Reimplemented in fcl::ShapeMeshDistanceTraversalNodeOBBRSS< S, NarrowPhaseSolver >, fcl::ShapeMeshDistanceTraversalNodekIOS< S, NarrowPhaseSolver >, fcl::ShapeMeshDistanceTraversalNodeRSS< S, NarrowPhaseSolver >, fcl::MeshShapeDistanceTraversalNodeOBBRSS< S, NarrowPhaseSolver >, fcl::MeshShapeDistanceTraversalNodekIOS< S, NarrowPhaseSolver >, fcl::MeshShapeDistanceTraversalNodeRSS< S, NarrowPhaseSolver >, fcl::MeshDistanceTraversalNodeOBBRSS, fcl::MeshDistanceTraversalNodekIOS, and fcl::MeshDistanceTraversalNodeRSS.
| Transform3f fcl::TraversalNodeBase::tf1 |
configuation of first object
Referenced by fcl::MeshShapeCollisionTraversalNodeOBB< S, NarrowPhaseSolver >::BVTesting(), fcl::MeshShapeCollisionTraversalNodeRSS< S, NarrowPhaseSolver >::BVTesting(), fcl::MeshShapeCollisionTraversalNodekIOS< S, NarrowPhaseSolver >::BVTesting(), fcl::MeshShapeCollisionTraversalNodeOBBRSS< S, NarrowPhaseSolver >::BVTesting(), fcl::initialize(), fcl::ShapeCollisionTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::ShapeDistanceTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::ShapeConservativeAdvancementTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodeOBB< S, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodeRSS< S, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodekIOS< S, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodeOBBRSS< S, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNode< S, kIOS, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNodeOBB< S, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNodeRSS< S, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNodekIOS< S, NarrowPhaseSolver >::leafTesting(), and fcl::ShapeMeshCollisionTraversalNodeOBBRSS< S, NarrowPhaseSolver >::leafTesting().
| Transform3f fcl::TraversalNodeBase::tf2 |
configuration of second object
Referenced by fcl::ShapeMeshCollisionTraversalNodeOBB< S, NarrowPhaseSolver >::BVTesting(), fcl::ShapeMeshCollisionTraversalNodeRSS< S, NarrowPhaseSolver >::BVTesting(), fcl::ShapeMeshCollisionTraversalNodekIOS< S, NarrowPhaseSolver >::BVTesting(), fcl::ShapeMeshCollisionTraversalNodeOBBRSS< S, NarrowPhaseSolver >::BVTesting(), fcl::initialize(), fcl::ShapeCollisionTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::ShapeDistanceTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::ShapeConservativeAdvancementTraversalNode< S1, S2, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNode< OBBRSS, S, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodeOBB< S, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodeRSS< S, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodekIOS< S, NarrowPhaseSolver >::leafTesting(), fcl::MeshShapeCollisionTraversalNodeOBBRSS< S, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNodeOBB< S, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNodeRSS< S, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNodekIOS< S, NarrowPhaseSolver >::leafTesting(), fcl::ShapeMeshCollisionTraversalNodeOBBRSS< S, NarrowPhaseSolver >::leafTesting(), and fcl::MeshShapeDistanceTraversalNode< OBBRSS, S, NarrowPhaseSolver >::leafTesting().

