bi-rrt-planner.hh File Reference
#include <hpp/core/path-planner.hh>
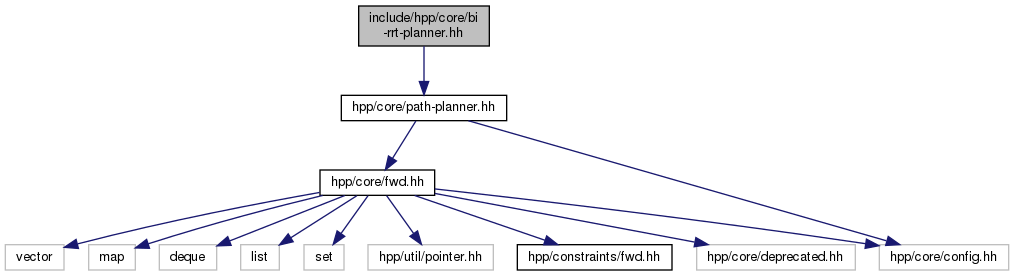
Include dependency graph for bi-rrt-planner.hh:
Go to the source code of this file.
Classes | |
| class | hpp::core::BiRRTPlanner |
Namespaces | |
| hpp | |
| hpp::core | |
|
hpp-core
4.9.0
Implement basic classes for canonical path planning for kinematic chains.
|
#include <hpp/core/path-planner.hh>Go to the source code of this file.
Classes | |
| class | hpp::core::BiRRTPlanner |
Namespaces | |
| hpp | |
| hpp::core | |
 1.8.13
1.8.13