problem.hh File Reference
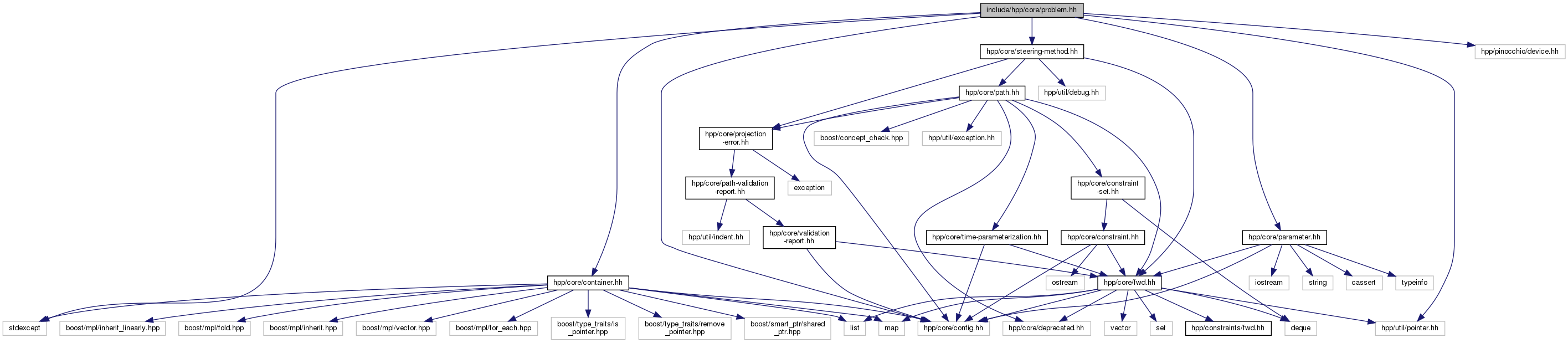
#include <stdexcept>#include <hpp/pinocchio/device.hh>#include <hpp/util/pointer.hh>#include <hpp/core/config.hh>#include <hpp/core/steering-method.hh>#include <hpp/core/container.hh>#include <hpp/core/parameter.hh>
Include dependency graph for problem.hh:
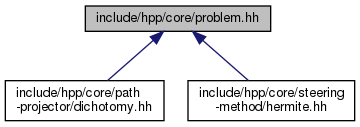
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hpp::core::Problem |
Namespaces | |
| hpp | |
| hpp::core | |
Macros | |
| #define | HPP_START_PARAMETER_DECLARATION(name) |
| #define | HPP_END_PARAMETER_DECLARATION(name) |
Macro Definition Documentation
◆ HPP_END_PARAMETER_DECLARATION
| #define HPP_END_PARAMETER_DECLARATION | ( | name | ) |
Value:
} \
}; \
extern "C" { \
}
std::string name(const LieGroupGenericTpl< LieGroupCollection > &lg)
