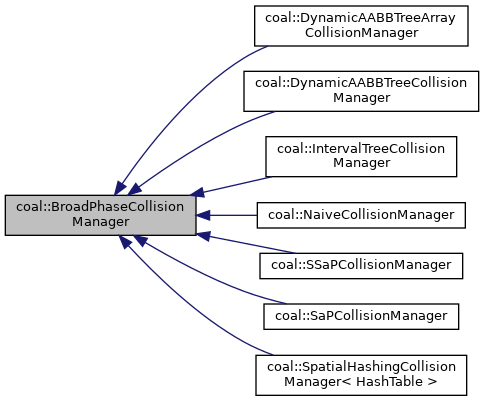
Base class for broad phase collision. It helps to accelerate the collision/distance between N objects. Also support self collision, self distance and collision/distance with another M objects. More...
#include <coal/broadphase/broadphase_collision_manager.h>
Public Member Functions | |
| BroadPhaseCollisionManager () | |
| virtual | ~BroadPhaseCollisionManager () |
| virtual void | registerObjects (const std::vector< CollisionObject * > &other_objs) |
| add objects to the manager | |
| virtual void | registerObject (CollisionObject *obj)=0 |
| add one object to the manager | |
| virtual void | unregisterObject (CollisionObject *obj)=0 |
| remove one object from the manager | |
| virtual void | setup ()=0 |
| initialize the manager, related with the specific type of manager | |
| virtual void | update ()=0 |
| update the condition of manager | |
| virtual void | update (CollisionObject *updated_obj) |
| update the manager by explicitly given the object updated | |
| virtual void | update (const std::vector< CollisionObject * > &updated_objs) |
| update the manager by explicitly given the set of objects update | |
| virtual void | clear ()=0 |
| clear the manager | |
| virtual void | getObjects (std::vector< CollisionObject * > &objs) const =0 |
| return the objects managed by the manager | |
| virtual std::vector< CollisionObject * > | getObjects () const |
| return the objects managed by the manager | |
| virtual void | collide (CollisionObject *obj, CollisionCallBackBase *callback) const =0 |
| perform collision test between one object and all the objects belonging to the manager | |
| virtual void | distance (CollisionObject *obj, DistanceCallBackBase *callback) const =0 |
| perform distance computation between one object and all the objects belonging to the manager | |
| virtual void | collide (CollisionCallBackBase *callback) const =0 |
| perform collision test for the objects belonging to the manager (i.e., N^2 self collision) | |
| virtual void | distance (DistanceCallBackBase *callback) const =0 |
| perform distance test for the objects belonging to the manager (i.e., N^2 self distance) | |
| virtual void | collide (BroadPhaseCollisionManager *other_manager, CollisionCallBackBase *callback) const =0 |
| perform collision test with objects belonging to another manager | |
| virtual void | distance (BroadPhaseCollisionManager *other_manager, DistanceCallBackBase *callback) const =0 |
| perform distance test with objects belonging to another manager | |
| virtual bool | empty () const =0 |
| whether the manager is empty | |
| virtual size_t | size () const =0 |
| the number of objects managed by the manager | |
Protected Member Functions | |
| bool | inTestedSet (CollisionObject *a, CollisionObject *b) const |
| void | insertTestedSet (CollisionObject *a, CollisionObject *b) const |
Protected Attributes | |
| std::set< std::pair< CollisionObject *, CollisionObject * > > | tested_set |
| tools help to avoid repeating collision or distance callback for the pairs of objects tested before. It can be useful for some of the broadphase algorithms. | |
| bool | enable_tested_set_ |
Detailed Description
Base class for broad phase collision. It helps to accelerate the collision/distance between N objects. Also support self collision, self distance and collision/distance with another M objects.
Constructor & Destructor Documentation
◆ BroadPhaseCollisionManager()
| coal::BroadPhaseCollisionManager::BroadPhaseCollisionManager | ( | ) |
◆ ~BroadPhaseCollisionManager()
|
virtual |
Member Function Documentation
◆ clear()
|
pure virtual |
◆ collide() [1/3]
|
pure virtual |
perform collision test with objects belonging to another manager
Implemented in coal::NaiveCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, coal::SSaPCollisionManager, coal::DynamicAABBTreeCollisionManager, and coal::DynamicAABBTreeArrayCollisionManager.
◆ collide() [2/3]
|
pure virtual |
perform collision test for the objects belonging to the manager (i.e., N^2 self collision)
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ collide() [3/3]
|
pure virtual |
perform collision test between one object and all the objects belonging to the manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ distance() [1/3]
|
pure virtual |
perform distance test with objects belonging to another manager
Implemented in coal::NaiveCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, coal::SSaPCollisionManager, coal::DynamicAABBTreeCollisionManager, and coal::DynamicAABBTreeArrayCollisionManager.
◆ distance() [2/3]
|
pure virtual |
perform distance computation between one object and all the objects belonging to the manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ distance() [3/3]
|
pure virtual |
perform distance test for the objects belonging to the manager (i.e., N^2 self distance)
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ empty()
|
pure virtual |
whether the manager is empty
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ getObjects() [1/2]
|
inlinevirtual |
return the objects managed by the manager
Reimplemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ getObjects() [2/2]
|
pure virtual |
return the objects managed by the manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, coal::SSaPCollisionManager, coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ insertTestedSet()
|
protected |
◆ inTestedSet()
|
protected |
◆ registerObject()
|
pure virtual |
add one object to the manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ registerObjects()
|
virtual |
add objects to the manager
Reimplemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, and coal::SaPCollisionManager.
◆ setup()
|
pure virtual |
initialize the manager, related with the specific type of manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ size()
|
pure virtual |
the number of objects managed by the manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ unregisterObject()
|
pure virtual |
remove one object from the manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ update() [1/3]
|
pure virtual |
update the condition of manager
Implemented in coal::NaiveCollisionManager, coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, coal::SpatialHashingCollisionManager< HashTable >, and coal::SSaPCollisionManager.
◆ update() [2/3]
|
virtual |
update the manager by explicitly given the object updated
Reimplemented in coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, and coal::SpatialHashingCollisionManager< HashTable >.
◆ update() [3/3]
|
virtual |
update the manager by explicitly given the set of objects update
Reimplemented in coal::DynamicAABBTreeCollisionManager, coal::DynamicAABBTreeArrayCollisionManager, coal::IntervalTreeCollisionManager, coal::SaPCollisionManager, and coal::SpatialHashingCollisionManager< HashTable >.
Member Data Documentation
◆ enable_tested_set_
|
mutableprotected |
◆ tested_set
|
mutableprotected |
tools help to avoid repeating collision or distance callback for the pairs of objects tested before. It can be useful for some of the broadphase algorithms.
The documentation for this class was generated from the following file:
- include/coal/broadphase/broadphase_collision_manager.h