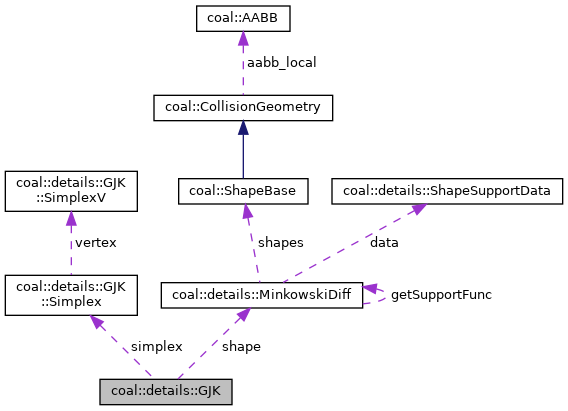
class for GJK algorithm
More...
#include <coal/narrowphase/gjk.h>
|
| struct | Simplex |
| | A simplex is a set of up to 4 vertices. Its rank is the number of vertices it contains. More...
|
| |
| struct | SimplexV |
| |
|
| | GJK (size_t max_iterations_, CoalScalar tolerance_) |
| |
| void | reset (size_t max_iterations_, CoalScalar tolerance_) |
| | resets the GJK algorithm, preparing it for a new run. Other than the maximum number of iterations and the tolerance, this function does not modify the parameters of the GJK algorithm. More...
|
| |
| Status | evaluate (const MinkowskiDiff &shape, const Vec3s &guess, const support_func_guess_t &supportHint=support_func_guess_t::Zero()) |
| | GJK algorithm, given the initial value guess. More...
|
| |
| void | getSupport (const Vec3s &d, SimplexV &sv, support_func_guess_t &hint) const |
| | apply the support function along a direction, the result is return in sv More...
|
| |
| bool | encloseOrigin () |
| | whether the simplex enclose the origin More...
|
| |
| Simplex * | getSimplex () const |
| | get the underlying simplex using in GJK, can be used for cache in next iteration More...
|
| |
| bool | hasClosestPoints () const |
| | Tells whether the closest points are available. More...
|
| |
| void | getWitnessPointsAndNormal (const MinkowskiDiff &shape, Vec3s &w0, Vec3s &w1, Vec3s &normal) const |
| |
| Vec3s | getGuessFromSimplex () const |
| | get the guess from current simplex More...
|
| |
| void | setDistanceEarlyBreak (const CoalScalar &dup) |
| | Distance threshold for early break. GJK stops when it proved the distance is more than this threshold. More...
|
| |
| bool | checkConvergence (const Vec3s &w, const CoalScalar &rl, CoalScalar &alpha, const CoalScalar &omega) const |
| | Convergence check used to stop GJK when shapes are not in collision. More...
|
| |
| size_t | getNumMaxIterations () const |
| | Get the max number of iterations of GJK. More...
|
| |
| CoalScalar | getTolerance () const |
| | Get the tolerance of GJK. More...
|
| |
| size_t | getNumIterations () const |
| | Get the number of iterations of the last run of GJK. More...
|
| |
| size_t | getNumIterationsMomentumStopped () const |
| | Get GJK number of iterations before momentum stops. Only usefull if the Nesterov or Polyak acceleration activated. More...
|
| |
class for GJK algorithm
- Note
- The computations are performed in the frame of the first shape.
◆ vertex_id_t
◆ Status
Status of the GJK algorithm: DidNotRun: GJK has not been run. Failed: GJK did not converge (it exceeded the maximum number of iterations). NoCollisionEarlyStopped: GJK found a separating hyperplane and exited before converting. The shapes are not in collision. NoCollision: GJK converged and the shapes are not in collision. Collision: GJK converged and the shapes are in collision. Failed: GJK did not converge.
| Enumerator |
|---|
| DidNotRun | |
| Failed | |
| NoCollisionEarlyStopped | |
| NoCollision | |
| CollisionWithPenetrationInformation | |
| Collision | |
◆ GJK()
| coal::details::GJK::GJK |
( |
size_t |
max_iterations_, |
|
|
CoalScalar |
tolerance_ |
|
) |
| |
|
inline |
- Parameters
-
| max_iterations_ | number of iteration before GJK returns failure. |
| tolerance_ | precision of the algorithm. |
The tolerance argument is useful for continuous shapes and for polyhedron with some vertices closer than this threshold.
Suggested values are 100 iterations and a tolerance of 1e-6.
◆ checkConvergence()
Convergence check used to stop GJK when shapes are not in collision.
◆ encloseOrigin()
| bool coal::details::GJK::encloseOrigin |
( |
| ) |
|
whether the simplex enclose the origin
◆ evaluate()
GJK algorithm, given the initial value guess.
◆ getGuessFromSimplex()
| Vec3s coal::details::GJK::getGuessFromSimplex |
( |
| ) |
const |
get the guess from current simplex
◆ getNumIterations()
| size_t coal::details::GJK::getNumIterations |
( |
| ) |
const |
|
inline |
Get the number of iterations of the last run of GJK.
◆ getNumIterationsMomentumStopped()
| size_t coal::details::GJK::getNumIterationsMomentumStopped |
( |
| ) |
const |
|
inline |
Get GJK number of iterations before momentum stops. Only usefull if the Nesterov or Polyak acceleration activated.
◆ getNumMaxIterations()
| size_t coal::details::GJK::getNumMaxIterations |
( |
| ) |
const |
|
inline |
Get the max number of iterations of GJK.
◆ getSimplex()
| Simplex* coal::details::GJK::getSimplex |
( |
| ) |
const |
|
inline |
get the underlying simplex using in GJK, can be used for cache in next iteration
◆ getSupport()
apply the support function along a direction, the result is return in sv
◆ getTolerance()
| CoalScalar coal::details::GJK::getTolerance |
( |
| ) |
const |
|
inline |
Get the tolerance of GJK.
◆ getWitnessPointsAndNormal()
Get the witness points on each object, and the corresponding normal.
- Parameters
-
| [in] | shape | is the Minkowski difference of the two shapes. |
| [out] | w0 | is the witness point on shape0. |
| [out] | w1 | is the witness point on shape1. |
| [out] | normal | is the normal of the separating plane found by GJK. It points from shape0 to shape1. |
◆ hasClosestPoints()
| bool coal::details::GJK::hasClosestPoints |
( |
| ) |
const |
|
inline |
Tells whether the closest points are available.
◆ reset()
| void coal::details::GJK::reset |
( |
size_t |
max_iterations_, |
|
|
CoalScalar |
tolerance_ |
|
) |
| |
resets the GJK algorithm, preparing it for a new run. Other than the maximum number of iterations and the tolerance, this function does not modify the parameters of the GJK algorithm.
◆ setDistanceEarlyBreak()
| void coal::details::GJK::setDistanceEarlyBreak |
( |
const CoalScalar & |
dup | ) |
|
|
inline |
Distance threshold for early break. GJK stops when it proved the distance is more than this threshold.
- Note
- The closest points will be erroneous in this case. If you want the closest points, set this to infinity (the default).
◆ convergence_criterion
◆ convergence_criterion_type
◆ distance
The distance between the two shapes, computed by GJK. If the distance is below GJK's threshold, the shapes are in collision in the eyes of GJK. If distance_upper_bound is set to a value lower than infinity, GJK will early stop as soon as it finds distance to be greater than distance_upper_bound.
◆ distance_upper_bound
| CoalScalar coal::details::GJK::distance_upper_bound |
◆ gjk_variant
◆ ray
| Vec3s coal::details::GJK::ray |
◆ shape
◆ simplex
| Simplex* coal::details::GJK::simplex |
◆ status
| Status coal::details::GJK::status |
◆ support_hint
The documentation for this struct was generated from the following file:
- include/coal/narrowphase/gjk.h