Loading...
Searching...
No Matches
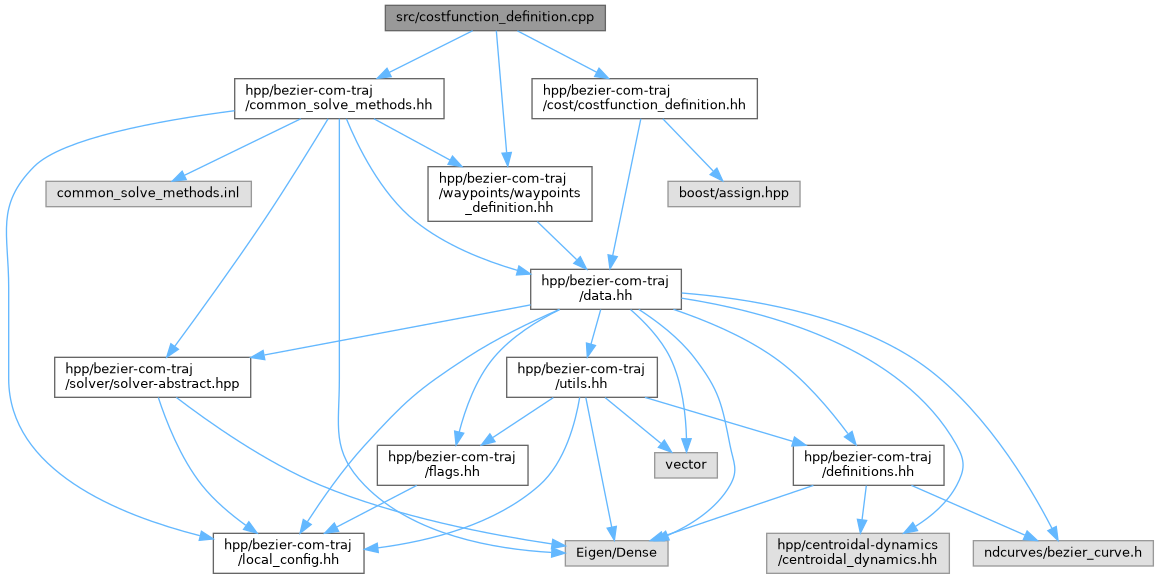
costfunction_definition.cpp File Reference
#include <hpp/bezier-com-traj/common_solve_methods.hh>#include <hpp/bezier-com-traj/cost/costfunction_definition.hh>#include <hpp/bezier-com-traj/waypoints/waypoints_definition.hh>
Include dependency graph for costfunction_definition.cpp:
Namespaces | |
| namespace | bezier_com_traj |
| namespace | bezier_com_traj::cost |
Typedefs | |
| typedef void(* | bezier_com_traj::cost::costCompute) (const ProblemData &, const VectorX &, const double, const T_time &, MatrixXX &, VectorX &) |
| typedef std::map< CostFunction, costCompute > | bezier_com_traj::cost::T_costCompute |
Functions | |
| void | bezier_com_traj::cost::computeCostMidPoint (const ProblemData &pData, const VectorX &, const double, const T_time &, MatrixXX &H, VectorX &g) |
| void | bezier_com_traj::cost::computeCostEndVelocity (const ProblemData &pData, const VectorX &, const double T, const T_time &, MatrixXX &H, VectorX &g) |
| void | bezier_com_traj::cost::computeCostMinAcceleration (const ProblemData &pData, const VectorX &Ts, const double, const T_time &timeArray, MatrixXX &H, VectorX &g) |
| void | bezier_com_traj::cost::genCostFunction (const ProblemData &pData, const VectorX &Ts, const double T, const T_time &timeArray, MatrixXX &H, VectorX &g) |
| genCostFunction generate a cost function according to the constraints of the problem, and the flag selected in ProblemData. The cost has the form x' H x + 2 g' x. | |