Loading...
Searching...
No Matches
solve.hh File Reference
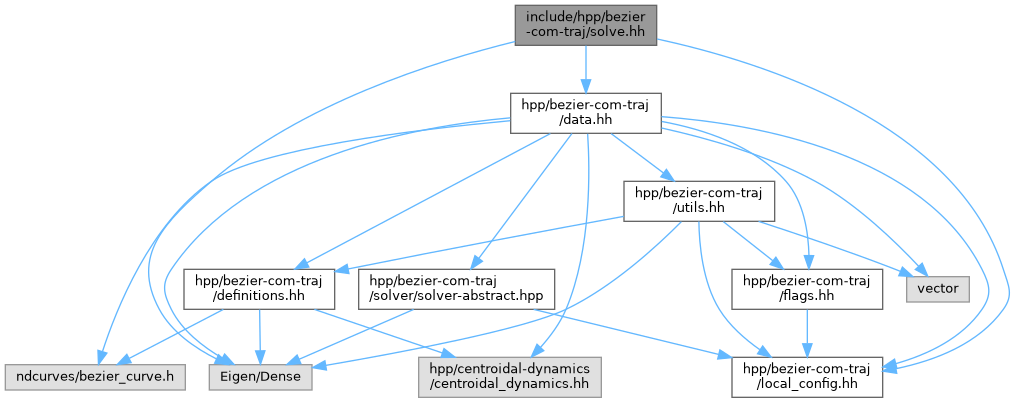
#include <Eigen/Dense>#include <hpp/bezier-com-traj/data.hh>#include <hpp/bezier-com-traj/local_config.hh>
Include dependency graph for solve.hh:
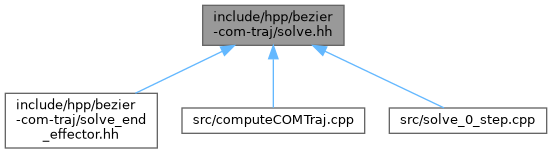
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | bezier_com_traj |
Functions | |
| BEZIER_COM_TRAJ_DLLAPI ResultDataCOMTraj | bezier_com_traj::solve0step (const ProblemData &pData, const std::vector< double > &Ts, const double timeStep=-1) |
| solve0step Tries to solve the 0-step capturability problem. Given the current contact phase, a COM position, and an initial velocity, tries to compute a feasible COM trajectory that stops the character without falling. In this specific implementation, the considered constraints are: init position and velocity, 0 velocity constraints (acceleration constraints are ignored) | |
| BEZIER_COM_TRAJ_DLLAPI ResultDataCOMTraj | bezier_com_traj::computeCOMTrajFixedSize (const ProblemData &pData, const VectorX &Ts, const unsigned int pointsPerPhase=3) |
| computeCOMTraj Tries to solve the one step problem : Given two or three contact phases, an initial and final com position and velocity, try to compute the CoM trajectory (as a Bezier curve) that connect them | |
| BEZIER_COM_TRAJ_DLLAPI ResultDataCOMTraj | bezier_com_traj::computeCOMTraj (const ProblemData &pData, const VectorX &Ts, const double timeStep=-1, const solvers::SolverType solver=solvers::SOLVER_QUADPROG) |
| computeCOMTraj Tries to solve the one step problem : Given two or three contact phases, an initial and final com position and velocity, try to compute the CoM trajectory (as a Bezier curve) that connect them | |