Loading...
Searching...
No Matches
solver-abstract.cpp File Reference
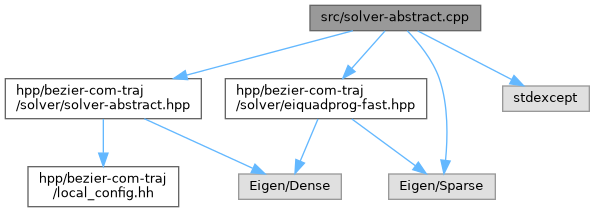
#include "hpp/bezier-com-traj/solver/solver-abstract.hpp"#include <Eigen/Sparse>#include <hpp/bezier-com-traj/solver/eiquadprog-fast.hpp>#include <stdexcept>
Include dependency graph for solver-abstract.cpp:
Namespaces | |
| namespace | solvers |
Typedefs | |
| typedef Eigen::SparseMatrix< double > | solvers::SpMat |
| typedef Eigen::SparseVector< double > | solvers::SpVec |
| typedef Eigen::SparseVector< int > | solvers::SpVeci |
Functions | |
| template<typename Derived > | |
| bool | solvers::is_nan (const Eigen::MatrixBase< Derived > &x) |
| ResultData BEZIER_COM_TRAJ_DLLAPI | solvers::solve (const MatrixXd &A, const VectorXd &b, const MatrixXd &D, const VectorXd &d, const MatrixXd &Hess, const VectorXd &g, const VectorXd &initGuess, Cref_vectorX minBounds, Cref_vectorX maxBounds, const SolverType solver) |
| solve Solve a QP or LP given init position and velocity, 0 velocity constraints (acceleration constraints are ignored) | |