Loading...
Searching...
No Matches
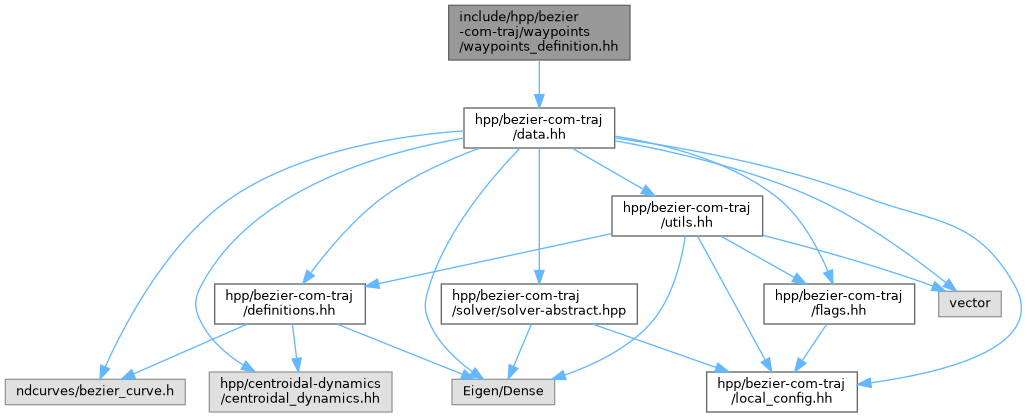
waypoints_definition.hh File Reference
#include <hpp/bezier-com-traj/data.hh>
Include dependency graph for waypoints_definition.hh:
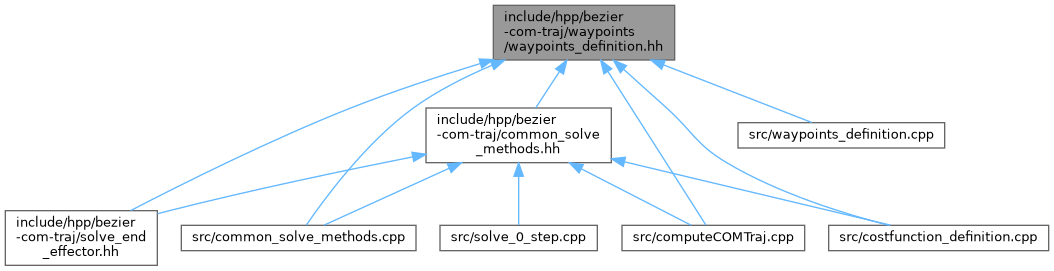
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | bezier_com_traj |
Functions | |
| coefs_t | bezier_com_traj::evaluateCurveAtTime (const ProblemData &pData, const std::vector< point_t > &pi, double t) |
| evaluateCurveAtTime compute the expression of the point on the curve c at t, defined by the waypoint pi and one free waypoint (x) | |
| coefs_t | bezier_com_traj::evaluateVelocityCurveAtTime (const ProblemData &pData, const std::vector< point_t > &pi, double T, double t) |
| evaluateVelocityCurveAtTime compute the expression of the point on the curve dc at t, defined by the waypoint pi and one free waypoint (x) | |
| coefs_t | bezier_com_traj::evaluateAccelerationCurveAtTime (const ProblemData &pData, const std::vector< point_t > &pi, double T, double t) |
| evaluateAccelerationCurveAtTime compute the expression of the point on the curve ddc at t, defined by the waypoint pi and one free waypoint (x) | |
| coefs_t | bezier_com_traj::evaluateJerkCurveAtTime (const ProblemData &pData, const std::vector< point_t > &pi, double T, double t) |
| evaluateAccelerationCurveAtTime compute the expression of the point on the curve ddc at t, defined by the waypoint pi and one free waypoint (x) | |
| std::vector< point_t > | bezier_com_traj::computeConstantWaypoints (const ProblemData &pData, double T) |
| computeConstantWaypoints compute the constant waypoints of c(t) defined by the constraints on initial and final states | |
| bezier_wp_t::t_point_t | bezier_com_traj::computeConstantWaypointsSymbolic (const ProblemData &pData, double T) |
| computeConstantWaypointsSymbolic compute the constant waypoints of c(t) defined by the constraints on initial and final states | |
| std::vector< waypoint_t > | bezier_com_traj::computeVelocityWaypoints (const ProblemData &pData, const double T, std::vector< bezier_t::point_t > pi=std::vector< bezier_t::point_t >()) |
| computeWwaypoints compute the constant waypoints of dc(t) defined by the constraints on initial and final states | |
| std::vector< waypoint_t > | bezier_com_traj::computeAccelerationWaypoints (const ProblemData &pData, const double T, std::vector< bezier_t::point_t > pi=std::vector< bezier_t::point_t >()) |
| computeWwaypoints compute the constant waypoints of ddc(t) defined by the constraints on initial and final states | |
| std::vector< waypoint_t > | bezier_com_traj::computeJerkWaypoints (const ProblemData &pData, const double T, std::vector< bezier_t::point_t > pi=std::vector< bezier_t::point_t >()) |
| computeWwaypoints compute the constant waypoints of dddc(t) defined by the constraints on initial and final states | |
| waypoint_t | bezier_com_traj::evaluateCurveWaypointAtTime (const ProblemData &pData, const std::vector< point_t > &pi, double t) |
| evaluateCurveAtTime compute the expression of the point on the curve c at t, defined by the waypoint pi and one free waypoint (x) | |
| waypoint_t | bezier_com_traj::evaluateVelocityCurveWaypointAtTime (const ProblemData &pData, const double T, const std::vector< point_t > &pi, double t) |
| evaluateCurveAtTime compute the expression of the point on the curve c at t, defined by the waypoint pi and one free waypoint (x) | |
| waypoint_t | bezier_com_traj::evaluateAccelerationCurveWaypointAtTime (const ProblemData &pData, const double T, const std::vector< point_t > &pi, double t) |
| evaluateCurveAtTime compute the expression of the point on the curve c at t, defined by the waypoint pi and one free waypoint (x) | |
| waypoint_t | bezier_com_traj::evaluateJerkCurveWaypointAtTime (const ProblemData &pData, const double T, const std::vector< point_t > &pi, double t) |
| evaluateCurveAtTime compute the expression of the point on the curve c at t, defined by the waypoint pi and one free waypoint (x) | |
| bezier_wp_t::t_point_t | bezier_com_traj::computeWwaypoints (const ProblemData &pData, double T) |
| computeConstantWaypoints compute the constant waypoints of w(t) defined by the constraints on initial and final states | |
| coefs_t | bezier_com_traj::computeFinalVelocityPoint (const ProblemData &pData, double T) |
| int | bezier_com_traj::dimVar (const ProblemData &pData) |
| std::pair< MatrixXX, VectorX > | bezier_com_traj::computeVelocityCost (const ProblemData &pData, double T, std::vector< bezier_t::point_t > pi) |
| computeVelocityCost the matrices H and g defining a cost that minimise the integral of the squared velocity | |