Loading...
Searching...
No Matches
matrix-view.hh File Reference
#include <Eigen/Core>#include <hpp/constraints/fwd.hh>#include <hpp/pinocchio/util.hh>#include <hpp/util/indent.hh>#include <iostream>#include <vector>#include <hpp/constraints/impl/matrix-view-operation.hh>#include <hpp/constraints/impl/matrix-view.hh>
Include dependency graph for matrix-view.hh:

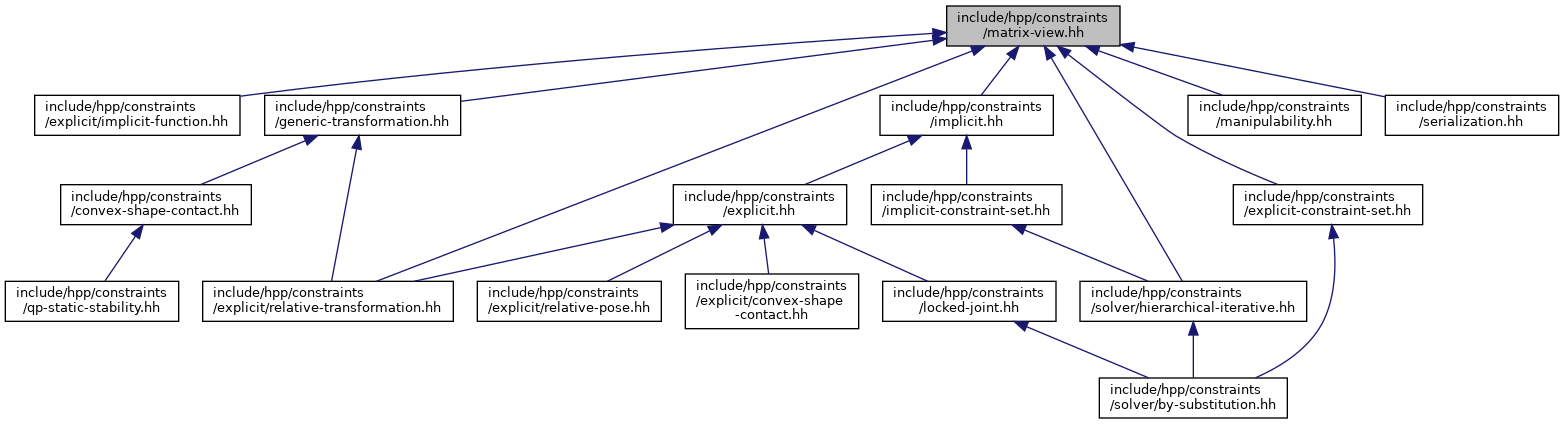
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | Eigen |
| namespace | Eigen::internal |
| namespace | hpp |
Macros | |
| #define | HPP_EIGEN_USE_EVALUATOR EIGEN_VERSION_AT_LEAST(3, 2, 92) |
| #define | EIGEN_MATRIX_BLOCKS_PUBLIC_INTERFACE(Derived) |
Typedefs | |
| typedef Eigen::MatrixBlocks< false, true > | Eigen::RowBlockIndices |
| typedef Eigen::MatrixBlocks< true, false > | Eigen::ColBlockIndices |
Functions | |
| template<typename Derived > | |
| std::ostream & | Eigen::operator<< (std::ostream &os, const MatrixBlocksBase< Derived > &mbi) |
Macro Definition Documentation
◆ EIGEN_MATRIX_BLOCKS_PUBLIC_INTERFACE
| #define EIGEN_MATRIX_BLOCKS_PUBLIC_INTERFACE | ( | Derived | ) |
Value:
enum { AllRows = _allRows, AllCols = _allCols }; \
typedef MatrixBlocksBase<Derived> Base; \
typedef typename Base::size_type size_type; \
typedef typename Base::segments_t segments_t; \
typedef typename Base::segment_t segment_t; \
typedef typename Base::RowIndices_t RowIndices_t; \
typedef typename Base::ColIndices_t ColIndices_t;
◆ HPP_EIGEN_USE_EVALUATOR
| #define HPP_EIGEN_USE_EVALUATOR EIGEN_VERSION_AT_LEAST(3, 2, 92) |