Loading...
Searching...
No Matches
common.idl File Reference
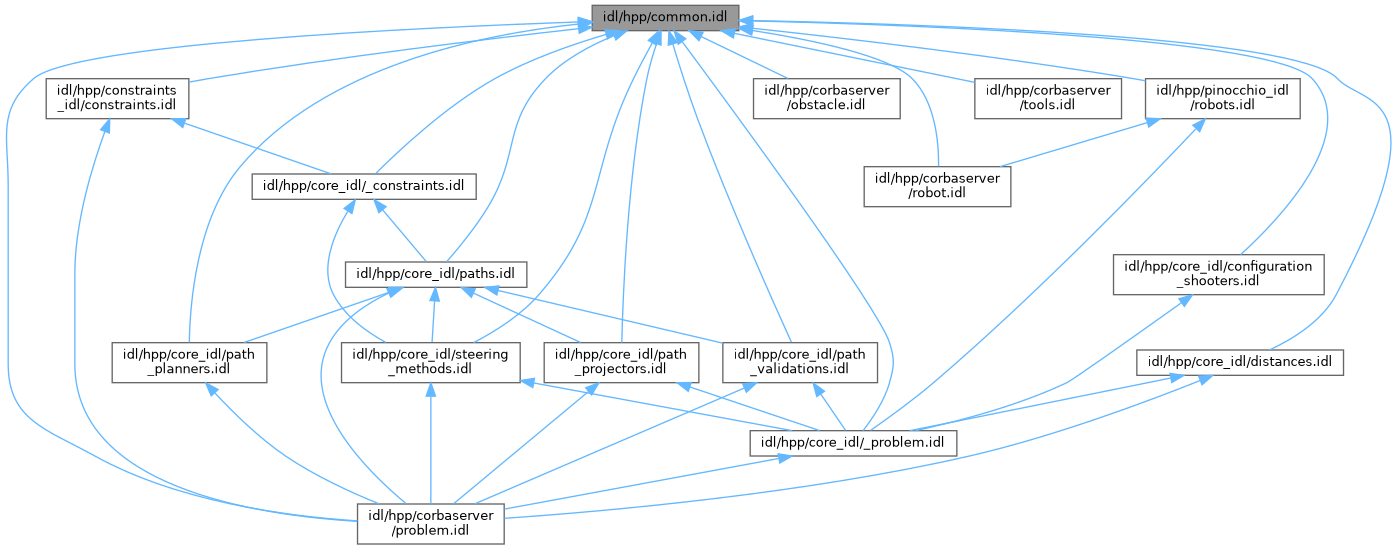
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| exception | hpp::Error |
| Corba exception travelling through the Corba channel. More... | |
Modules | |
| namespace | hpp |
| Implement CORBA interface `‘Obstacle’'. | |
Macros | |
| #define | HPP_EXPOSE_MEMORY_DEALLOCATION(ErrorType) void deleteThis() raises (ErrorType); boolean deleteIfExpired() raises (ErrorType); void persistantStorage(in boolean persistant) raises (ErrorType); |
Typedefs | |
| typedef double | hpp::value_type |
| typedef long long | hpp::size_type |
| typedef unsigned long | hpp::frame_index |
| typedef sequence< string > | hpp::Names_t |
| Sequence of names. | |
| typedef sequence< Names_t > | hpp::stringSeqSeq |
| typedef sequence< boolean > | hpp::boolSeq |
| typedef sequence< long > | hpp::intSeq |
| typedef sequence< intSeq > | hpp::intSeqSeq |
| typedef sequence< double > | hpp::floatSeq |
| Robot configuration is defined by a sequence of dof value. | |
| typedef sequence< floatSeq > | hpp::floatSeqSeq |
| typedef double | hpp::Transform_[7] |
| Element of SE(3) represented by a vector and a unit quaternion. | |
| typedef sequence< Transform_ > | hpp::TransformSeq |
| typedef double | hpp::Quaternion_[4] |
| typedef sequence< ComparisonType > | hpp::ComparisonTypes_t |
Enumerations | |
| enum | hpp::ComparisonType { hpp::Equality , hpp::EqualToZero , hpp::Superior , hpp::Inferior } |
| Comparison types for implicit constraints. More... | |
Macro Definition Documentation
◆ HPP_EXPOSE_MEMORY_DEALLOCATION
| #define HPP_EXPOSE_MEMORY_DEALLOCATION | ( | ErrorType | ) | void deleteThis() raises (ErrorType); boolean deleteIfExpired() raises (ErrorType); void persistantStorage(in boolean persistant) raises (ErrorType); |