Loading...
Searching...
No Matches
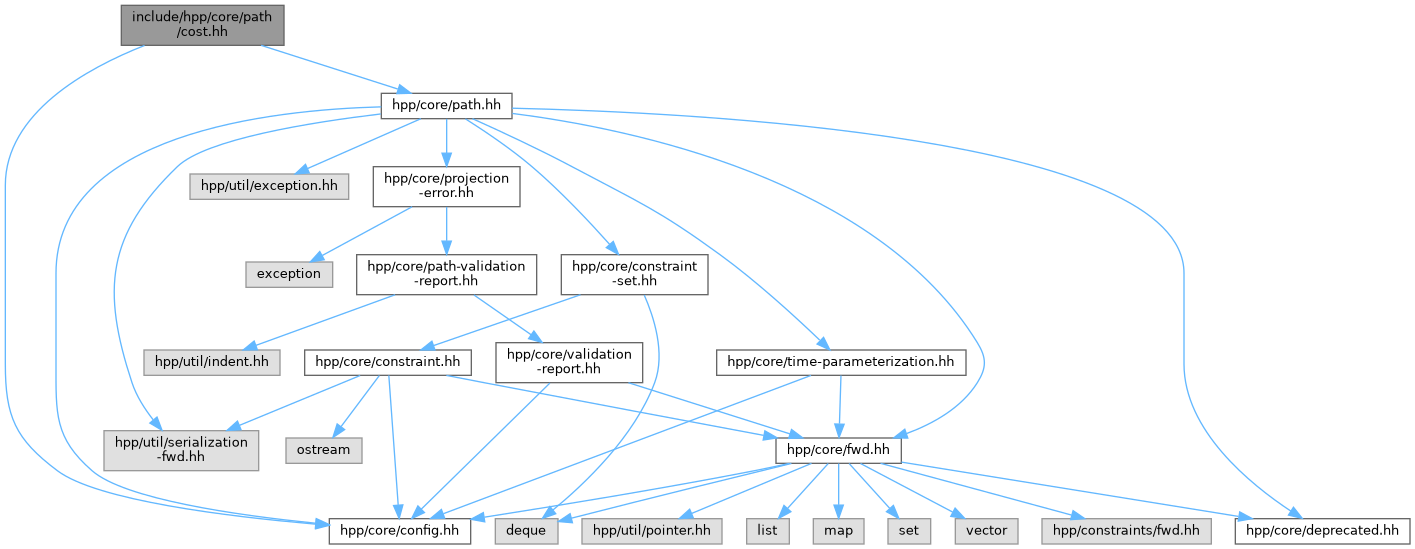
cost.hh File Reference
Include dependency graph for cost.hh:
Go to the source code of this file.
Classes | |
| class | hpp::core::path::Cost |
| class | hpp::core::path::cost::Length |
| Length of a path as cost. More... | |
Namespaces | |
| namespace | hpp |
| namespace | hpp::core |
| namespace | hpp::core::path |
| namespace | hpp::core::path::cost |