Loading...
Searching...
No Matches
core Directory Reference
Directory dependency graph for core:
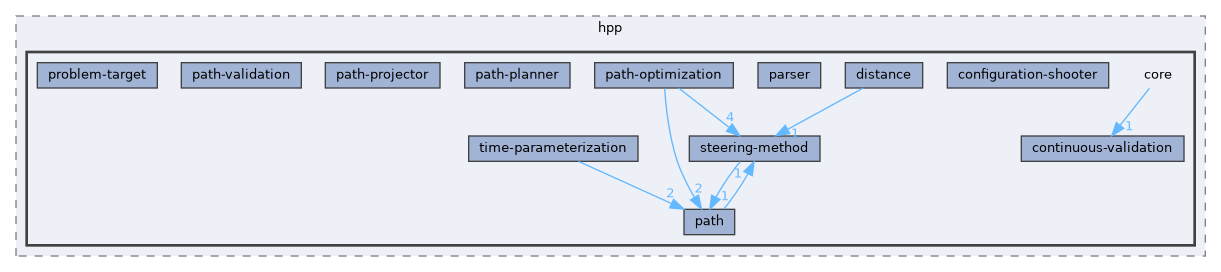
Directories | |
| configuration-shooter | |
| continuous-validation | |
| distance | |
| parser | |
| path | |
| path-optimization | |
| path-planner | |
| path-projector | |
| path-validation | |
| problem-target | |
| steering-method | |
| time-parameterization | |