Loading...
Searching...
No Matches
fwd.hh File Reference
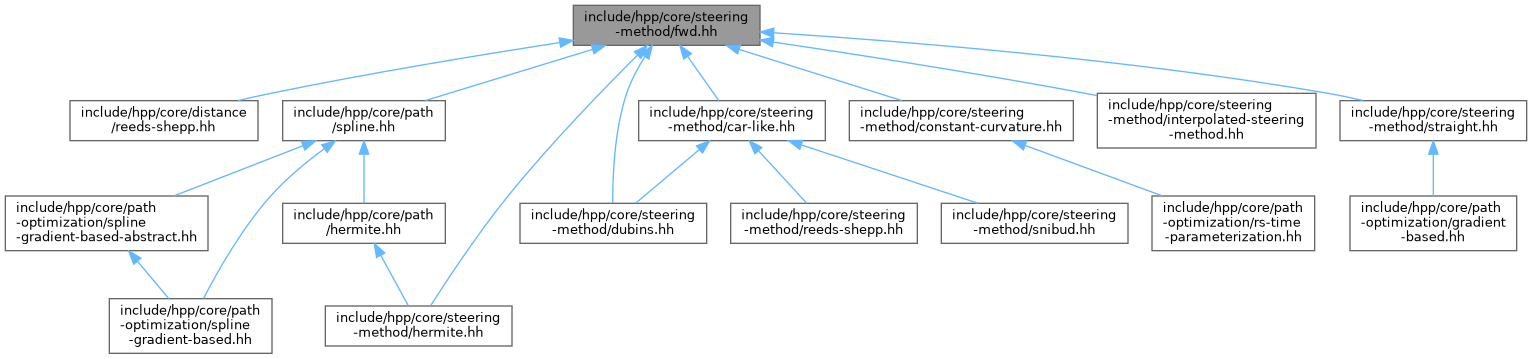
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | hpp |
| namespace | hpp::core |
| namespace | hpp::core::steeringMethod |
Typedefs | |
| typedef shared_ptr< Straight > | hpp::core::steeringMethod::StraightPtr_t |
| typedef shared_ptr< CarLike > | hpp::core::steeringMethod::CarLikePtr_t |
| typedef shared_ptr< ConstantCurvature > | hpp::core::steeringMethod::ConstantCurvaturePtr_t |
| typedef shared_ptr< Dubins > | hpp::core::steeringMethod::DubinsPtr_t |
| typedef shared_ptr< Snibud > | hpp::core::steeringMethod::SnibudPtr_t |
| typedef shared_ptr< Hermite > | hpp::core::steeringMethod::HermitePtr_t |