contact_patch_solver.h File Reference
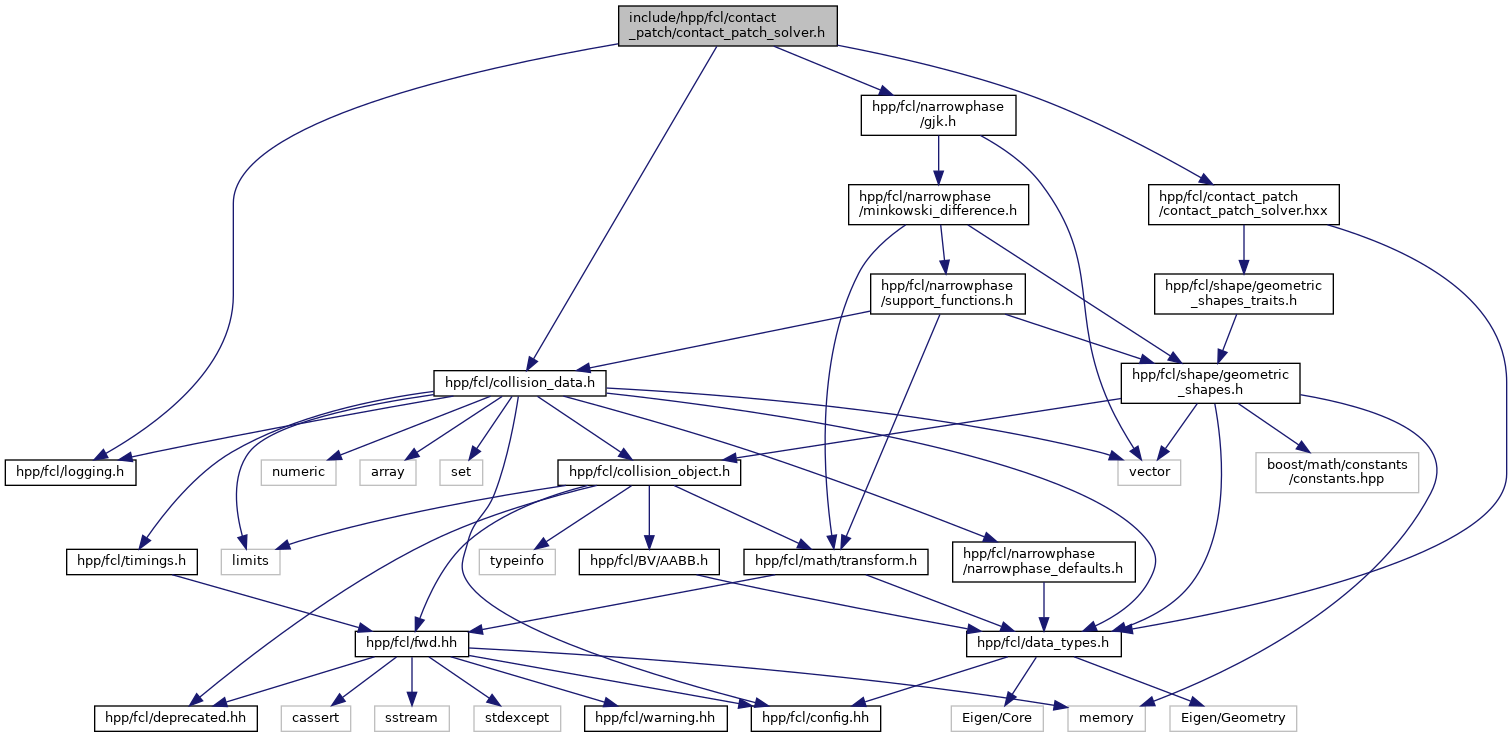
#include "hpp/fcl/collision_data.h"#include "hpp/fcl/logging.h"#include "hpp/fcl/narrowphase/gjk.h"#include "hpp/fcl/contact_patch/contact_patch_solver.hxx"
Include dependency graph for contact_patch_solver.h:
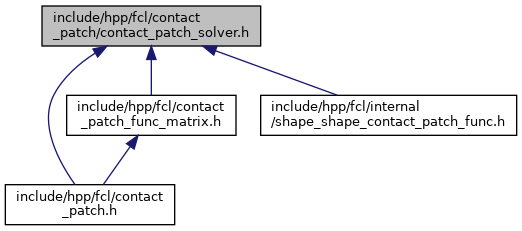
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | hpp::fcl::ContactPatchSolver |
Solver to compute contact patches, i.e. the intersection between two contact surfaces projected onto the shapes' separating plane. Otherwise said, a contact patch is simply the intersection between two support sets: the support set of shape S1 in direction n and the support set of shape S2 in direction -n, where n is the contact normal (satisfying the optimality conditions of GJK/EPA). More... | |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |