geometric_shapes.h File Reference
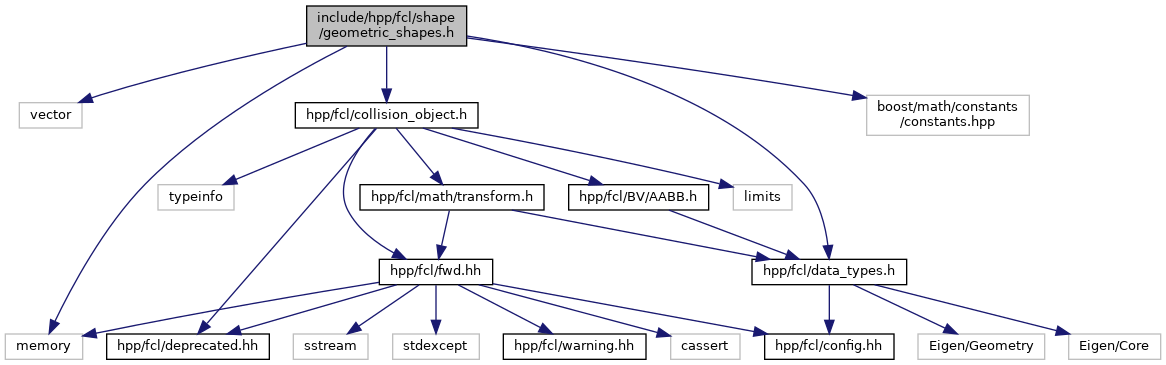
#include <vector>#include <memory>#include <boost/math/constants/constants.hpp>#include "hpp/fcl/collision_object.h"#include "hpp/fcl/data_types.h"
Include dependency graph for geometric_shapes.h:
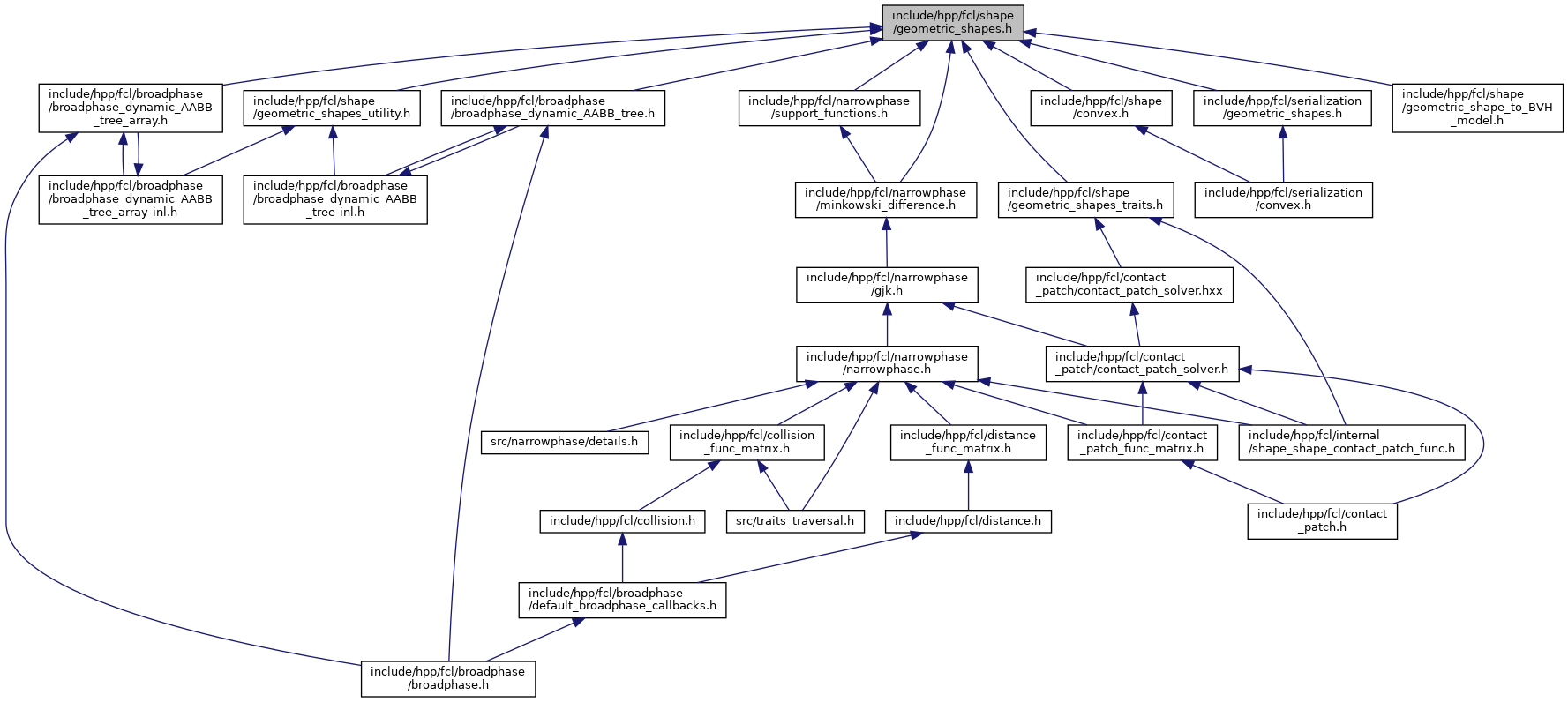
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hpp::fcl::ShapeBase |
| Base class for all basic geometric shapes. More... | |
| class | hpp::fcl::TriangleP |
| Triangle stores the points instead of only indices of points. More... | |
| class | hpp::fcl::Box |
| Center at zero point, axis aligned box. More... | |
| class | hpp::fcl::Sphere |
| Center at zero point sphere. More... | |
| class | hpp::fcl::Ellipsoid |
| Ellipsoid centered at point zero. More... | |
| class | hpp::fcl::Capsule |
| Capsule It is \( { x~\in~\mathbb{R}^3, d(x, AB) \leq radius } \) where \( d(x, AB) \) is the distance between the point x and the capsule segment AB, with \( A = (0,0,-halfLength), B = (0,0,halfLength) \). More... | |
| class | hpp::fcl::Cone |
| Cone The base of the cone is at \( z = - halfLength \) and the top is at \( z = halfLength \). More... | |
| class | hpp::fcl::Cylinder |
| Cylinder along Z axis. The cylinder is defined at its centroid. More... | |
| class | hpp::fcl::ConvexBase |
| Base for convex polytope. More... | |
| struct | hpp::fcl::ConvexBase::Neighbors |
| struct | hpp::fcl::ConvexBase::SupportWarmStartPolytope |
The support warm start polytope contains certain points of this which are support points in specific directions of space. This struct is used to warm start the support function computation for large meshes (num_points > 32). More... | |
| class | hpp::fcl::Halfspace |
| Half Space: this is equivalent to the Plane in ODE. A Half space has a priviledged direction: the direction of the normal. The separation plane is defined as n * x = d; Points in the negative side of the separation plane (i.e. {x | n * x < d}) are inside the half space and points in the positive side of the separation plane (i.e. {x | n * x > d}) are outside the half space. Note: prefer using a Halfspace instead of a Plane if possible, it has better behavior w.r.t. collision detection algorithms. More... | |
| class | hpp::fcl::Plane |
| Infinite plane. A plane can be viewed as two half spaces; it has no priviledged direction. Note: prefer using a Halfspace instead of a Plane if possible, it has better behavior w.r.t. collision detection algorithms. More... | |
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |