hpp::fcl::SaPCollisionManager::EndPoint Struct Reference
End point for an interval. More...
#include <hpp/fcl/broadphase/broadphase_SaP.h>
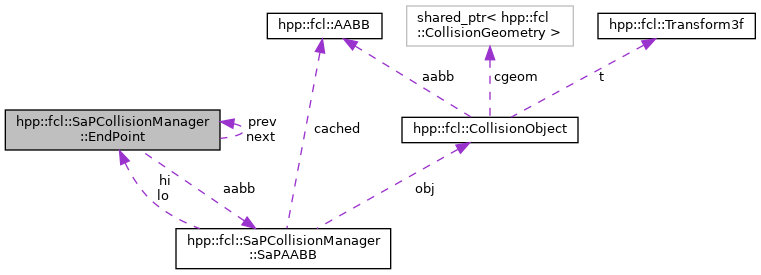
Collaboration diagram for hpp::fcl::SaPCollisionManager::EndPoint:
Public Member Functions | |
| const Vec3f & | getVal () const |
| get the value of the end point More... | |
| Vec3f & | getVal () |
| set the value of the end point More... | |
| FCL_REAL | getVal (size_t i) const |
| FCL_REAL & | getVal (size_t i) |
Public Attributes | |
| char | minmax |
| tag for whether it is a lower bound or higher bound of an interval, 0 for lo, and 1 for hi More... | |
| SaPAABB * | aabb |
| back pointer to SAP interval More... | |
| EndPoint * | prev [3] |
| the previous end point in the end point list More... | |
| EndPoint * | next [3] |
| the next end point in the end point list More... | |
Detailed Description
End point for an interval.
Member Function Documentation
◆ getVal() [1/4]
| Vec3f& hpp::fcl::SaPCollisionManager::EndPoint::getVal | ( | ) |
set the value of the end point
◆ getVal() [2/4]
| const Vec3f& hpp::fcl::SaPCollisionManager::EndPoint::getVal | ( | ) | const |
get the value of the end point
◆ getVal() [3/4]
| FCL_REAL& hpp::fcl::SaPCollisionManager::EndPoint::getVal | ( | size_t | i | ) |
◆ getVal() [4/4]
| FCL_REAL hpp::fcl::SaPCollisionManager::EndPoint::getVal | ( | size_t | i | ) | const |
Member Data Documentation
◆ aabb
| SaPAABB* hpp::fcl::SaPCollisionManager::EndPoint::aabb |
back pointer to SAP interval
◆ minmax
| char hpp::fcl::SaPCollisionManager::EndPoint::minmax |
tag for whether it is a lower bound or higher bound of an interval, 0 for lo, and 1 for hi
◆ next
| EndPoint* hpp::fcl::SaPCollisionManager::EndPoint::next[3] |
the next end point in the end point list
◆ prev
| EndPoint* hpp::fcl::SaPCollisionManager::EndPoint::prev[3] |
the previous end point in the end point list
The documentation for this struct was generated from the following file:
- include/hpp/fcl/broadphase/broadphase_SaP.h
