Loading...
Searching...
No Matches
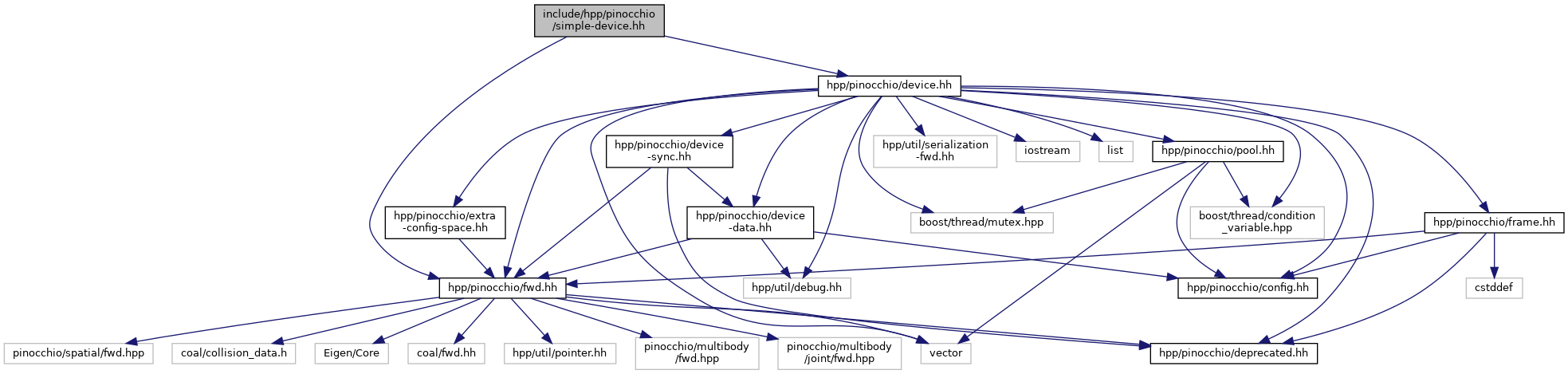
simple-device.hh File Reference
Include dependency graph for simple-device.hh:
Go to the source code of this file.
Namespaces | |
| namespace | hpp |
| Utility functions. | |
| namespace | hpp::pinocchio |
| namespace | hpp::pinocchio::unittest |
Functions | |
| DevicePtr_t | hpp::pinocchio::humanoidSimple (const std::string &name="humanoidSimple", bool usingFF=true, Computation_t compFlags=(Computation_t)(JOINT_POSITION|JACOBIAN)) |
| DevicePtr_t | hpp::pinocchio::humanoidSimple (const std::string &name="humanoidSimple", Computation_t compFlags=(Computation_t)(JOINT_POSITION|JACOBIAN)) |
| DevicePtr_t | hpp::pinocchio::unittest::makeDevice (TestDeviceType type, const std::string &prefix="") |