pinocchiorobot.hh File Reference
#include "pinocchio/multibody/data.hpp"#include "pinocchio/multibody/model.hpp"#include "pinocchio/parsers/urdf.hpp"#include "pinocchio/spatial/se3.hpp"
Include dependency graph for pinocchiorobot.hh:

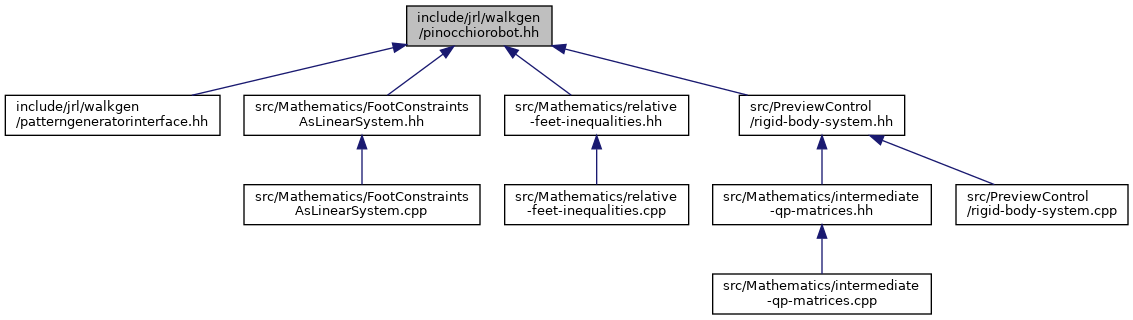
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | PatternGeneratorJRL::PinocchioRobotFoot_t |
| class | PatternGeneratorJRL::PinocchioRobot |
Namespaces | |
| PatternGeneratorJRL | |
| \doc Simulate a rigid body | |
| PatternGeneratorJRL::pinocchio_robot | |
Typedefs | |
| typedef PinocchioRobotFoot_t | PatternGeneratorJRL::PRFoot |
Variables | |
| const int | PatternGeneratorJRL::pinocchio_robot::RPY_SIZE = 6 |
| const int | PatternGeneratorJRL::pinocchio_robot::QUATERNION_SIZE = 7 |
