|
sot-torque-control
1.6.5
Collection of dynamic-graph entities aimed at implementing torque control on different robots.
|


|
|
sot-torque-control
1.6.5
Collection of dynamic-graph entities aimed at implementing torque control on different robots.
|
|
#include <dynamic-graph/factory.h>#include <sot/core/debug.hh>#include <sot/torque_control/utils/trajectory-generators.hh>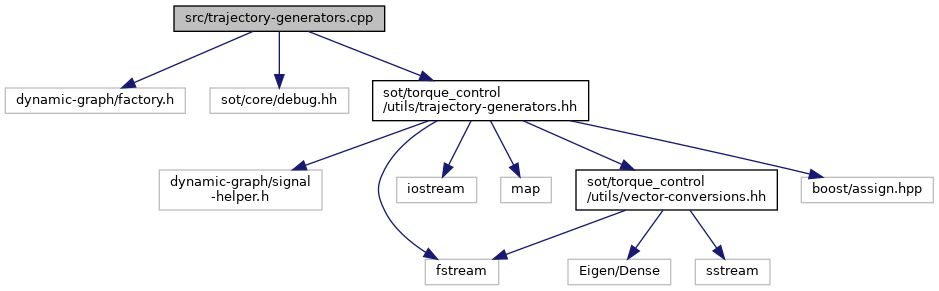
Go to the source code of this file.
Namespaces | |
| dynamicgraph | |
| to read text file | |
| dynamicgraph::sot | |
| dynamicgraph::sot::torque_control | |
 1.8.17
1.8.17