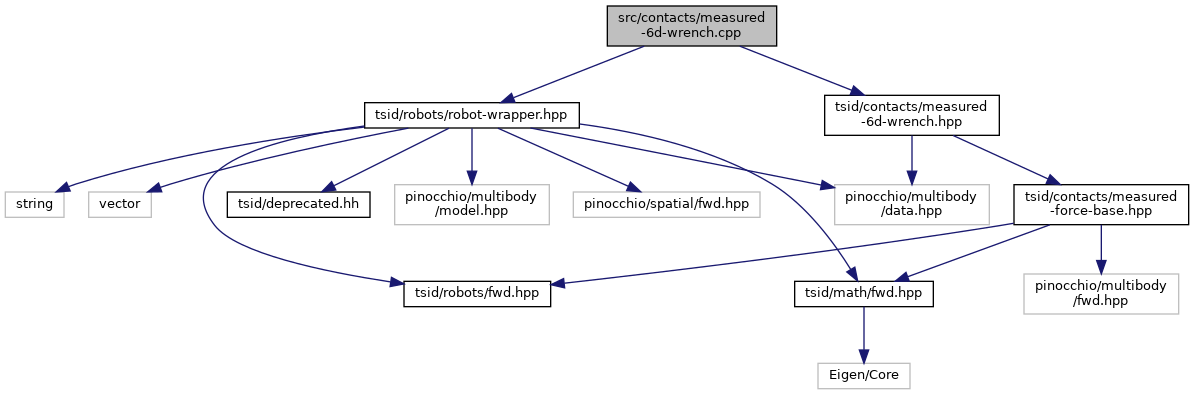
measured-6d-wrench.cpp File Reference
Include dependency graph for measured-6d-wrench.cpp:
Namespaces | |
| tsid | |
| tsid::contacts | |
|
tsid
1.8.0
Efficient Task Space Inverse Dynamics for Multi-body Systems based on Pinocchio
|
Namespaces | |
| tsid | |
| tsid::contacts | |