task-contact-force-equality.cpp File Reference
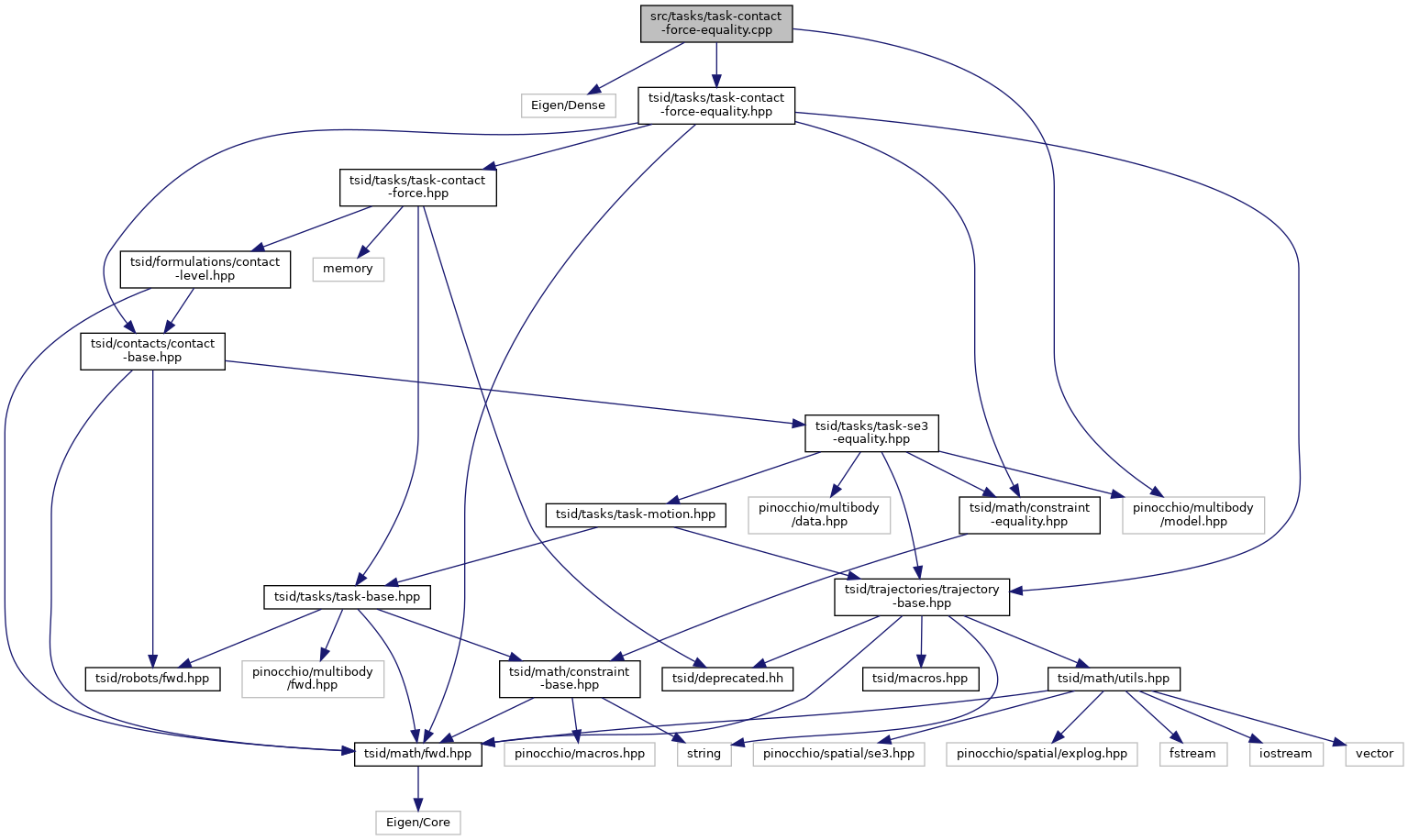
#include <Eigen/Dense>#include <pinocchio/multibody/model.hpp>#include "tsid/tasks/task-contact-force-equality.hpp"
Include dependency graph for task-contact-force-equality.cpp:
Namespaces | |
| tsid | |
| tsid::tasks | |