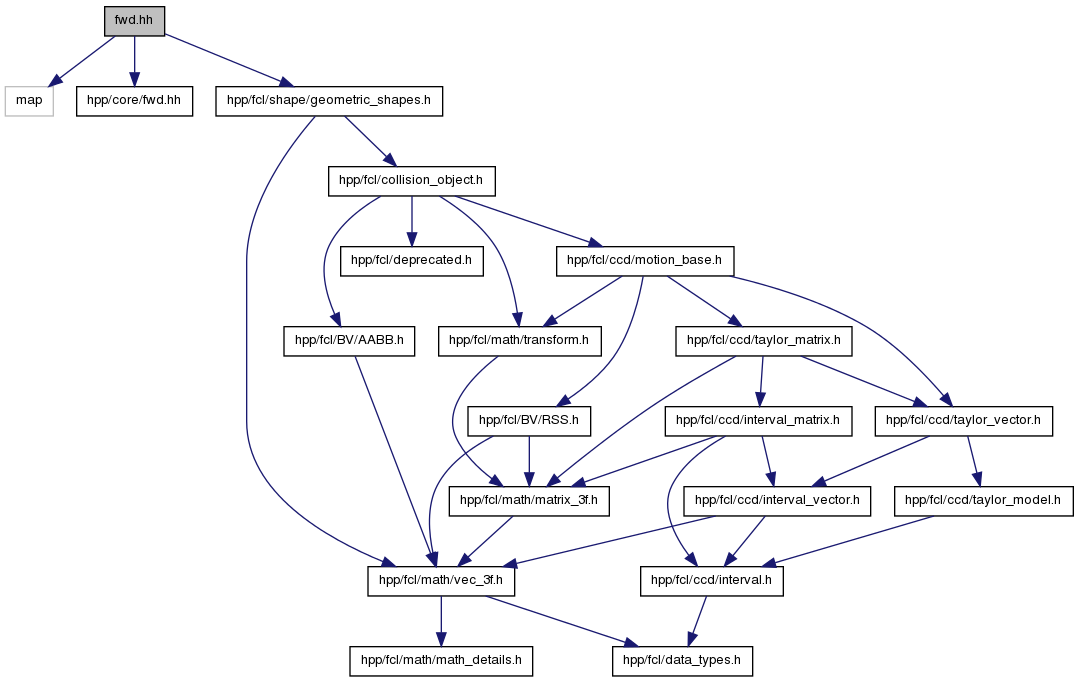
#include <map>
#include <hpp/core/fwd.hh>
#include <hpp/fcl/shape/geometric_shapes.h>
Copyright (c) 2014 CNRS Authors: Florent Lamiraux.