#include <hpp/manipulation/device.hh>

Public Types | |
| typedef model::HumanoidRobot | Parent_t |
Public Member Functions | |
| virtual std::ostream & | print (std::ostream &os) const |
| Print object in a stream. | |
Accessors to container elements | |
Contained elements are of type model::Gripper, Handle and TriangleList | |
| template<typename Element > | |
| const Element & | get (const std::string &name) const |
| Get an element of a container. | |
| template<typename Element > | |
| const Container< Element > ::ElementMap_t & | getAll () const |
| Get the underlying map of a container. | |
| template<typename Element > | |
| void | add (const std::string &name, const Element &element) |
| Add an element to a container. | |
Collisions | |
| void | prepareInsertRobot () |
| Cache joint vector. | |
| void | didInsertRobot () |
| Add collisions between the joint vector cache initialized by prepareInsertRobot() add the current Robot. | |
Static Public Member Functions | |
| static DevicePtr_t | create (const std::string &name) |
| Constructor. | |
Protected Member Functions | |
| Device (const std::string &name) | |
| Constructor. | |
| void | init (const DeviceWkPtr_t &self) |
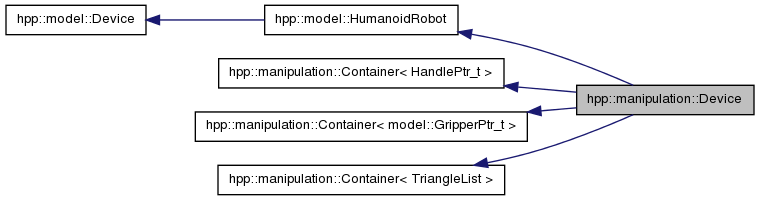
Device with handles.
As a deriving class of hpp::model::HumanoidRobot, it is compatible with hpp::model::urdf::loadHumanoidRobot
This class also contains model::Gripper, Handle and TriangleList
| hpp::manipulation::Device::Device | ( | const std::string & | name | ) | [inline, protected] |
Constructor.
| name | of the new instance, |
| robot | Robots that manipulate objects, |
| objects | Set of objects manipulated by the robot. |
Reimplemented from hpp::model::Device.
| void hpp::manipulation::Device::add | ( | const std::string & | name, |
| const Element & | element | ||
| ) | [inline] |
Add an element to a container.
| static DevicePtr_t hpp::manipulation::Device::create | ( | const std::string & | name | ) | [inline, static] |
Constructor.
| name | of the new instance, |
Reimplemented from hpp::model::HumanoidRobot.
References init().
Add collisions between the joint vector cache initialized by prepareInsertRobot() add the current Robot.
When creating a robot from several URDF files, this enables collisions between joints from different files.
| const Element& hpp::manipulation::Device::get | ( | const std::string & | name | ) | const [inline] |
Get an element of a container.
Reimplemented from hpp::manipulation::Container< model::GripperPtr_t >.
| const Container<Element>::ElementMap_t& hpp::manipulation::Device::getAll | ( | ) | const [inline] |
Get the underlying map of a container.
Reimplemented from hpp::manipulation::Container< model::GripperPtr_t >.
| void hpp::manipulation::Device::init | ( | const DeviceWkPtr_t & | self | ) | [inline, protected] |
Reimplemented from hpp::model::Device.
Referenced by create().
| void hpp::manipulation::Device::prepareInsertRobot | ( | ) | [inline] |
Cache joint vector.
| virtual std::ostream& hpp::manipulation::Device::print | ( | std::ostream & | os | ) | const [inline, virtual] |
Print object in a stream.
Reimplemented from hpp::manipulation::Container< model::GripperPtr_t >.

