Namespaces | |
| namespace | hpp |
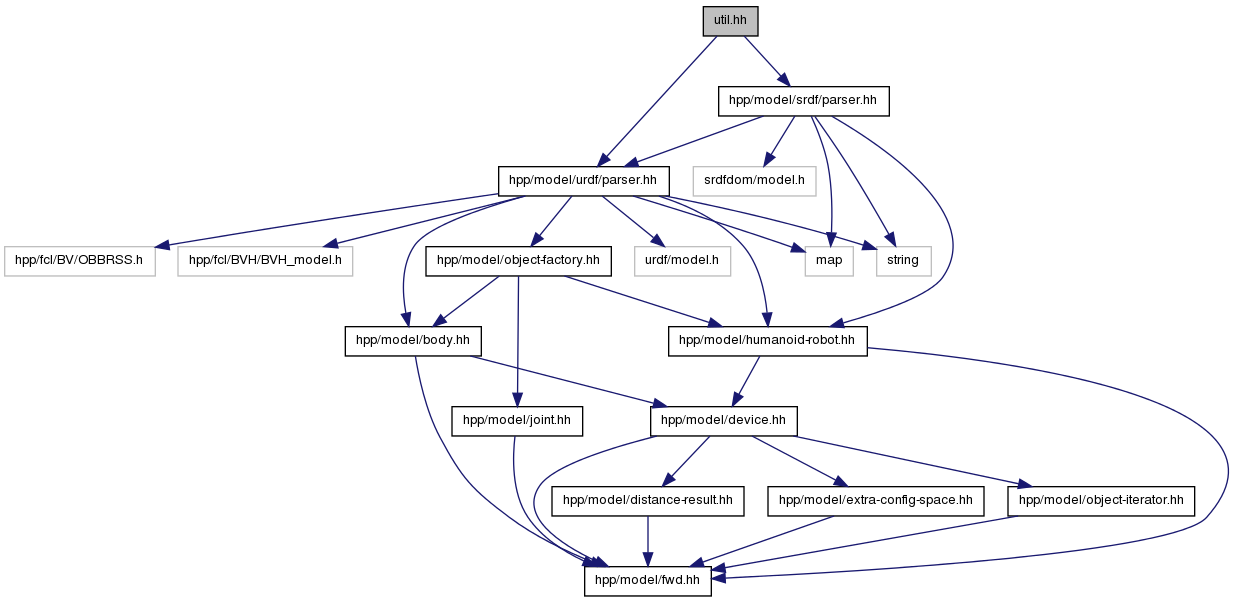
Declaration of SRDF Parser. | |
| namespace | hpp::model |
| namespace | hpp::model::urdf |
Functions | |
| void | hpp::model::urdf::loadRobotModel (const DevicePtr_t &robot, const JointPtr_t &baseJoint, const std::string &prefix, const std::string &rootJointType, const std::string &package, const std::string &modelName, const std::string &urdfSuffix, const std::string &srdfSuffix) |
| Load robot model by name. | |
| void | hpp::model::urdf::loadRobotModel (const DevicePtr_t &robot, const std::string &rootJointType, const std::string &package, const std::string &modelName, const std::string &urdfSuffix, const std::string &srdfSuffix) |
| void | hpp::model::urdf::loadRobotModelFromParameter (const DevicePtr_t &robot, const std::string &rootJointType, const std::string &urdfParameter, const std::string &srdfParameter) |
| Load robot model from ROS parameter. | |
| void | hpp::model::urdf::loadHumanoidModel (const model::HumanoidRobotPtr_t &robot, const JointPtr_t &baseJoint, const std::string &prefix, const std::string &rootJointType, const std::string &package, const std::string &modelName, const std::string &urdfSuffix, const std::string &srdfSuffix) |
| Load humanoid robot model by name. | |
| void | hpp::model::urdf::loadHumanoidModel (const model::HumanoidRobotPtr_t &robot, const std::string &rootJointType, const std::string &package, const std::string &modelName, const std::string &urdfSuffix, const std::string &srdfSuffix) |
| void | hpp::model::urdf::loadHumanoidModelFromParameter (const model::HumanoidRobotPtr_t &robot, const std::string &rootJointType, const std::string &urdfParameter, const std::string &srdfParameter) |
| Load humanoid robot model from ROS parameter. | |
| void | hpp::model::urdf::loadUrdfModel (const DevicePtr_t &robot, const JointPtr_t &baseJoint, const std::string &prefix, const std::string &rootJointType, const std::string &package, const std::string &filename) |
| Load only urdf model file. | |
| void | hpp::model::urdf::loadUrdfModel (const DevicePtr_t &robot, const std::string &rootJointType, const std::string &package, const std::string &filename) |


