convex-shape.hh File Reference
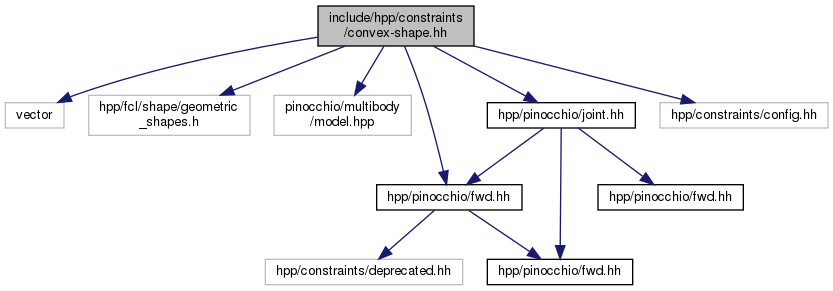
#include <vector>#include <hpp/fcl/shape/geometric_shapes.h>#include <pinocchio/multibody/model.hpp>#include <hpp/pinocchio/joint.hh>#include <hpp/constraints/fwd.hh>#include <hpp/constraints/config.hh>
Include dependency graph for convex-shape.hh:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hpp::constraints::ConvexShape |
| struct | hpp::constraints::ConvexShapeData |
Namespaces | |
| hpp | |
| hpp::constraints | |
Functions | |
| void | hpp::constraints::closestPointToSegment (const vector3_t &P, const vector3_t &A, const vector3_t &v, vector3_t &B) |
| vector3_t | hpp::constraints::linePlaneIntersection (const vector3_t &A, const vector3_t &u, const vector3_t &P, const vector3_t &n) |
